Luna-Glob status in 2014 and 2015
|
Status of the Luna-Glob project in 2013 More than a year after the disastrous fiasco of the Phobos mission, Russian engineers still had much work to do to prevent history repeating itself with the upcoming unmanned moon landing. According to multiple industry sources, work on the Moon-bound Luna-Glob landers suffers from the legacy that doomed Phobos-Grunt, the only Russian deep-space mission in two decades.
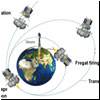
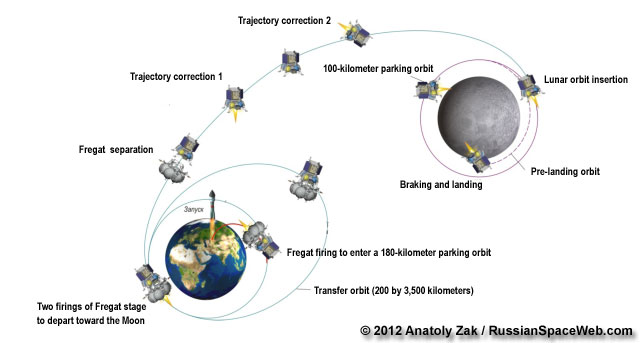
A scenario of the Luna-Glob lander mission, as it was envisioned by the end of 2011. Credit: Roskosmos Moon shot seeks to escape shadow of previous failures The ambitious Luna-Glob project (a.k.a. Luna-25) was brought to the forefront of the Russian planetary exploration program in 2012, in the wake of the Phobos-Grunt disaster. Officially advertised as an exercise in planetary landing, Luna-Glob could also search for water ice, a high-stake pursuit for modern planetary science. However before Luna-Glob could perform its risky landing, it would have to enter a parking orbit around the Earth, then conduct escape maneuvers from the Earth orbit and, ultimately, navigate itself through space for a rendezvous with the Moon. Although these would be all less challenging phases of the flight than the landing itself, they would still require a sophisticated and thoroughly tested flight control system and reliable communications with the Earth. Both of these crucial aspects of any deep-space mission were lacking at the time of the Phobos-Grunt launch and doomed the flight almost immediately after its liftoff, as this web site had predicted. However, the official investigation conveniently blamed the Phobos-Grunt failure on space particles and the developer of the spacecraft -- NPO Lavochkin -- then proceeded with plans for an ambitious lunar program. Critics argued that any Moon-landing attempt would have to be preceded by a simplified test mission that would try the upgraded flight control computer and deep-space communications. However, the idea went nowhere, because “the landing vehicle was already in the works,” insiders said. Dumping Phobos-Grunt's computer legacy According to industry sources, NPO Lavochkin did purge its own team responsible for next-generation flight-control computers and its software and worked to reshuffle other divisions involved in deep-space projects. In October 2012, the RIA Novosti news agency confirmed reports that NPO Lavochkin had decided to scrap the flight control computers originally developed for Phobos-Grunt and also intended for many future planetary missions. NPO Lavochkin initally chose to adopt the flight-proven computer from the Russian GLONASS navigation satellite developed at ISS Reshetnev, the former employer of NPO Lavochkin's current Designer General Viktor Khartov. This public disclosure was an indirect admission that design problems of flight control computers onboard Phobos-Grunt were so serious that they had required to throw away the entire system, rather than to harden it to withstand the space environment. However such a drastic move had its own pitfalls, requiring massive development and testing to adapt the new computer for Luna-Glob, as well as completely rewrite its software for a totally new and unique task. Yet, NPO Lavochkin reportedly rushed the system onboard, “haphazardly implementing changes without adequate integration into the spacecraft,” one critic wrote on the web forum of the Novosti Kosmonavtiki magazine. “The project follows down the path of Phobos-Grunt,” he concluded. Other reliable sources within the industry echoed this opinion. This skepticism reflected some opposition within NPO Lavochkin to the use of an untried external supplier for the spacecraft's "brain," despite the availability of much more familiar hardware within the company. Developers of the Karat spacecraft at NPO Lavochkin pushed their own computer that had proved itself in space during the first mission of the spacecraft. Karat's flight control system was designed within NPO Lavochkin and was equipped with the core computer, or TsBK, developed at NII Submikron based in Zelenograd near Moscow. The latter company had previously supplied Lavochkin with similar systems for its classified satellites, including Araks and Oko. Karat used only two modules out of the four comprising the architecture of this flight control computer, yet it performed well during the mission and gave the company's engineers, programmers and flight controllers invaluable experience for future projects like Luna-Glob. NPO Lavochkin also built extensive test infrastructure for this flight control system. Another contender for the job of controlling the Luna-Glob mission was a computer supplied by OKB Mars for NPO Lavochkin's Navigator platform. The machine proved itself during the missions of Elektro-L No. 1 and Spektr-R spacecraft, which were based on Navigator. OKB Mars also had long and productive relations with NPO Lavochkin going back all the way to the Soviet era. Management challenges Not surprisingly, Viktor Khartov's lobbying for his former employer as a new supplier of a critical system for a critical project caused quite a stir within NPO Lavochkin. Coincidently in February 2013, the Russian press reported that Khartov was to vacate his post of Designer General at NPO Lavochkin for a leading position at TsNIIMash institute, the main certification center of the Russian space agency, Roskosmos. Even though this move was presented as a promotion, behind the scene, Khartov had fought and so far won the battle with Roskosmos to avoid going into this honorary exile, sources familiar with the matter said. No right for an error Whichever "brain" the Luna-Glob would ultimately get, it had its work cutout for it. A flight profile designed for the first Russian moon landing in 40 years leaves no time for any troubleshooting, should the initial phase of the mission go even slightly off track from its pre-programmed scenario, critics say. According to the flight program, a Soyuz-2 launch vehicle will release the Luna-Glob spacecraft attached to its Fregat booster stage into a low (and unstable) parking orbit around the Earth. The Fregat will then quickly fire its engines twice to send the probe in the general direction of the Moon, and separate. Immediately thereafter, mission control will have to analyze the actual trajectory, calculate necessary adjustments and, just 30 hours after the launch, command the spacecraft to conduct a high-precision trajectory correction to ensure its rendezvous with the Moon. All of this will be relying on untried onboard computers and mission control team with no prior experience with this type of mission. (The last spacecraft that Russian ground controllers had a chance to guide through deep space were the ill-fated Phobos probes launched in 1988!) As a result, any glitch in executing the orbit-correction maneuver will spell the end of the mission. Critics argued that Luna-Glob or even a specially built prototype spacecraft would have to be placed into a high orbit around the Earth first, where ground controllers could test various modes of command and control. However, the mission architecture of the Luna-Glob did not afford resources for doing so and no time or budget was available for a precursor test mission. Communications challenges Another weak link during the risky trek of Luna-Glob to the Moon would be deep-space communications. The latest communication gear onboard Phobos-Grunt famously failed not only in receiving ground commands to the spacecraft, but also in sending data back that could at least help investigate causes of the disaster. During the short-lived mission, ground controllers never had a chance to test a specialized X-band communications system designed to work in deep space. Not surprisingly, developers called for testing a such system in space onboard a low-cost experimental vehicle before relying on it during a critical mission like Spektr-RG or Luna-Glob. Unfortunately, as of 2013, Moscow-based OAO RKS, the developer of the X-band communications system was able to provide NPO Lavochkin only with a test package that was not suitable for operations in space. As a result, NPO Lavochkin had to drop initial plans to flight-test the X-band communications during the upcoming mission of the second Karat satellite. Schedule pressures The developers can only console themselves with the fact that unlike missions to Phobos, lunar landings are not constrained by a one-in-two-years launch window. Luna-Glob is currently scheduled to lift off in 2015 or 2016, but could be easily postponed by months or even years to complete its development. Even though Luna-Glob was proclaimed to be the next Russian mission into deep space, in reality, within the very busy launch manifest of NPO Lavochkin, it stands far behind three civilian spacecraft: the second Karat platform (scheduled to fly in 2013), the second Elektro-L satellite (set to fly in 2014), and the Spektr-RG orbital observatory (expected to fly at the end of 2014 or in 2015). As of April 2013, Elektro-L was undergoing electrical tests, keeping busy a large team of engineers. In addition, NPO Lavochkin specialists continued their involvement with the already flying Elektro-L No. 1 and Spektr-R spacecraft and actively worked on the development of the Arktika remote-sensing satellite. Although a small team at Lavochkin was assigned to work exclusively on Luna-Glob, a much wider cadre currently occupied with the testing of MKA, Elektro-L and Spektr-RG would have to join the lunar effort in order to bring the spacecraft to the launch pad, sources said. According to insiders, lack of qualified engineers could not be resolved by "throwing money at the problem." India's exit It is still unclear whether the overloaded development team at Lavochkin could find itself under any political pressure to launch lunar missions. According to original plans, the first Russian lunar probe would have to lift off no later than 2014 and carry an Indian rover in an undeclared race to the lunar surface with a Chinese lander. However Indian plans to beat Chinese to the Moon essentially collapsed in the wake of Phobos-Grunt. The next opportunity to deliver the Indian rover to the Moon would be with the Luna-Resurs mission (a.k.a. Luna-27) then promised to fly in 2017. According to Russian officials, the Indian space agency, ISRO, had not yet responded to the renewed offer from Roskosmos to join the Luna-Resurs project. Giving the fact that the political rational for the mission was largely lost and Phobos-Grunt seriously undermined the Russian planetary program, India’s silence was understandable. Development continues As of April 2013, NPO Lavochkin was working to complete the new addendum to the preliminary design of the Luna-Glob project in September or October of 2013. Simultaneously, the next phase of development -- the production of the design documentation -- was also underway, thus breaking the ideal order for the development of spacecraft, where the design documentation would be produced only after the preliminary design had been ironed out. In any case, "to build the lunar lander in just two years would be completely unrealistic even during the Soviet period, let alone right now, making the 2015 launch date completely impossible," an experienced engineer at NPO Lavochkin told the editor of this web site. As of July 2013, the defense of the preliminary design of the Luna-Glob and Luna-Resurs missions was expected in November of that year. By October 2013, the launch of Luna-Glob was officially set for 2016. At the same time, Deputy Designer General at NPO Lavochkin Maksim Martynov told RIA Novosti news agency that the technological prototype of the Luna-Glob lander would be ready by the end of 2014. Equipped with most operational systems but propulsion, it would be used primarily for testing of the vehicle's onboard avionics and software. By that time, a development prototype of Luna-Glob, as well as a vibration and strength prototype, antennas-testing prototype had already been built and were undergoing various stages of testing, along with various components tested by Lavochkin's subcontractors, Martynov said. According to Martynov, NPO Lavochkin completed the documentation on the additions and changes to the Luna-Glob spacecraft and the formal defense of the project was scheduled for October 22.
Science instruments proposed for Luna-Glob as of Feb. 12, 2013:
|
|