|
Russian lunar exploration plans in 2012 Following the Phobos-Grunt fiasco in November 2011, a new Russian plan for unmanned lunar exploration emerged at the beginning of 2012. Although launch dates of the upcoming missions had to be delayed in order to learn the lessons of Phobos-Grunt, the unmanned lunar exploration program received a priority among planetary missions. A relative proximity of the Moon could enable Russian engineers to regain experience in navigating deep-space missions and to rebuild lost Soviet capabilities in planetary landing. A total of five launches were now planned, with an ultimate goal of delivering samples of the lunar soil back to Earth following a decade-long effort.
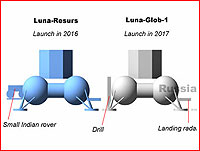
A Russian plan for unmanned missions to the Moon formulated during 2012. (Clickable)
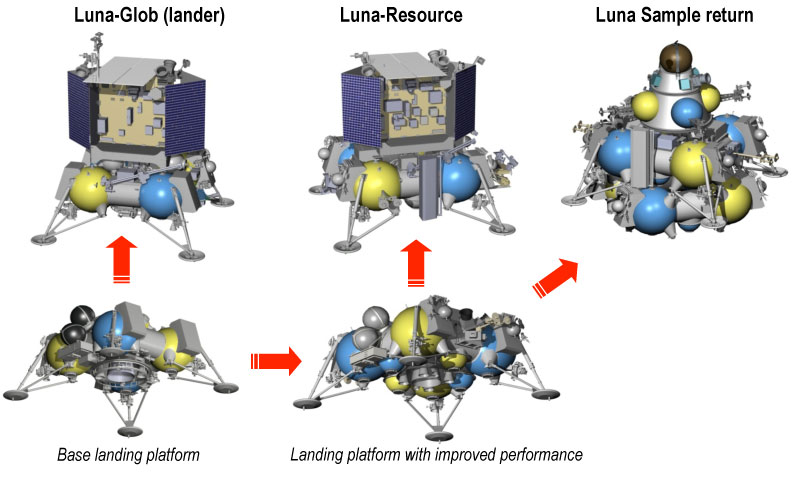
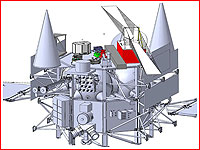
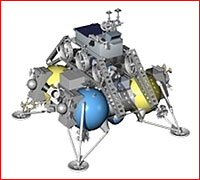
A design heritage of Russian lunar landers proposed for development during 2010s and 2020s. (Clickable)
According to the original (pre-Phobos-Grunt) strategy, Luna-Resurs and Luna-Glob missions would be followed by a pair of Luna-Grunt missions: one carrying a soil-gathering rover and another a return rocket for the delivery of samples back to Earth. However by 2012, a more conservative approach was adopted. According to the new plan, an additional Luna-Resurs-2 mission was inserted into the program with a launch date around 2018. It would carry a reconnaissance rover with a soil drill and a radio-beacon. The mission would test for the first time an "adaptive" landing mode using signals from a radio-beacon and enabling more accurate navigation of the vehicle during the descent than that available in Luna-Resurs-1 and Luna-Glob missions. If successful, this new landing technique would be employed during the Luna-Grunt-1 mission in 2020. It would deliver a long-range rover to the surface, which would be capable of gathering, preliminary analysis, storage and uploading of soil samples into the return rocket. The return rocket would be delivered in a separate mission — Luna-Grunt-2 — which would arrive to the Moon in 2021. Unlike all previous missions using a basic 2,200-kilogram spacecraft launched by the Soyuz-2.1b rocket, Luna-Grunt would employ a newly developed cruise stage launched by a larger Proton vehicle. The design change would increase the mass of the Luna-Grunt-2 spacecraft to three tons and boost its payload from 220 to 400 kilograms. In 2012, European space officials also started negotiations with representative of Roskosmos and TsNIIMash on the possible use of a European-built optical navigation and obstacle-avoidance system on Russian lunar missions. Although the use of such hardware on Luna-Glob was considered unlikely, it could be integrated into the follow-on Luna-Resurs spacecraft. This European hardware was inherited from ESA's Lunar Lander project, which was effectively cancelled in November 2012. Luna-Glob and Luna-Resurs switch places By Spring 2012, the Luna-Glob project went back to its original first position on the list of Russian missions to the Moon, as it had been planned prior to the Russian-Indian agreement on the Luna-Resurs mission in the 2000s. According to the plan announced on April 10, 2012, the lander of the Luna-Glob mission would head to the Moon as early as 2015. In this conservative and cautious strategy, the Luna-Glob lander would have minimum scientific capabilities, with the primary goal being the development of techniques for soft landing. The orbiting phase of the Luna-Glob mission would come in 2016, carrying as much as 100 kilograms of scientific payloads for remote-sensing of the Moon from its orbit. Finally, in 2017, a Russian-Indian landing mission would follow. After 2020, a pair of rovers could be sent to the Moon, which would travel as far as 30 kilometers from their touchdown site. Vehicles could carry a soil-drilling device capable of penetrating lunar regolith up to two meters in depth. By 2023, the Earth return vehicle might reach the Moon and receive soil samples from rovers. Russian scientists also considered using rovers for docking operations, which could pave the way to the robotic lunar research base, known in Russian as Lunny Poligon. Lander to lead the Russian lunar program In the summer of 2012, a presentation of the Space Research Institute, IKI, featured a plan where the Luna-Glob orbiter would fly first around 2015, followed by the Luna-Glob lander in 2016. Under such a scenario, the orbiting phase of the mission would enable Russian engineers to sort out all potential problems of communications and control of the spacecraft in deep space before a much more challenging and risky landing mission would be attempted. If both of these missions were successfull, Russia would be ready to take responsibility for carrying out a major international obligation of delivering an Indian rover to the surface of the Moon within the Luna-Resurs project in 2017. A major drawback of the plan was on the political front, as both Russia and India were now widely expected to lose the "second Moon Race" to China, which planned its own unmanned lunar landing. However, after the Phobos-Grunt fiasco in 2011, it became inevitable in any case. According to the same Russian plan, Luna-Glob and Luna-Glob projects would pave the way to the lunar sample return mission as early as 2019, which, in turn, could provide a solid foundation for delivering soil from Phobos and, thus, finally fulfilling original goals of the Phobos-Grunt project. Ultimately, hardware and experience accumulated in these projects could be employed to return soil samples from the surface of Mars around or after 2024. Despite a common sense of launching an orbiter ahead of the lander, Russian planners had to go with the landing mission first. According to industry sources, by 2012, the propulsion system and tank structure for the Luna-Resurs mission already appeared in metal, along with a number of other components of the lander. However in the process of its development, the Luna-Resurs lander gained weight from the originally projected 1,275 to 1,450 kilograms, reportedly taking it beyond the capabilities of the Indian GSLV II rocket that was suppose to launch it along with an Indian-built orbiter. As a result, it was decided to complete the landing vehicle under the name of Luna-Glob-1 (a.k.a Luna-Glob Lander) and launch it separately on the Soyuz-2-1b/Fregat rocket in November 2015 or in the summer of 2016. See also: Status of the Luna-Glob project in 2013 Following a lander, another Soyuz-2 rocket would launch an orbiting mission toward the Moon in 2016. The spacecraft apparently had its own "overweight" problems, canceling its planned launch in tandem with a Luna-Glob lander. As an added benefit of the solo launch, the orbiter could now carry more propellant, which would afford its maneuvering to a lower orbit for more detailed scientific research than previously planned. The landing component of the former Luna-Glob mission was rescheduled to fly in 2017 under the name of Luna-Resurs. It was expected to have an increased payload capacity than Luna-Glob-1, sport improved landing gear and carry more propellant and a larger array of scientific instruments than its predecessor in 2015.
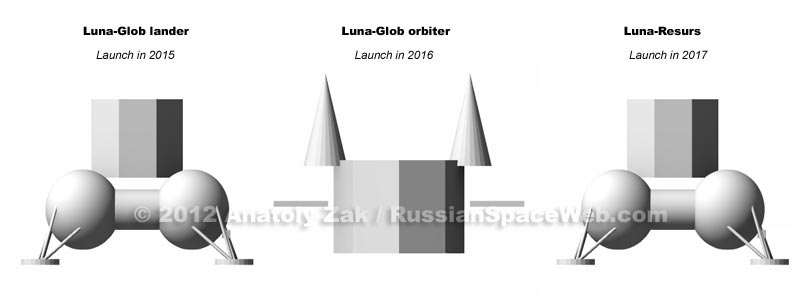
Timeline of Russian unmanned missions to the Moon as of middle of 2012:
Timeline of Russian unmanned missions to the Moon as of beginning of 2012:
|

|