| |
|
The Navigator service module
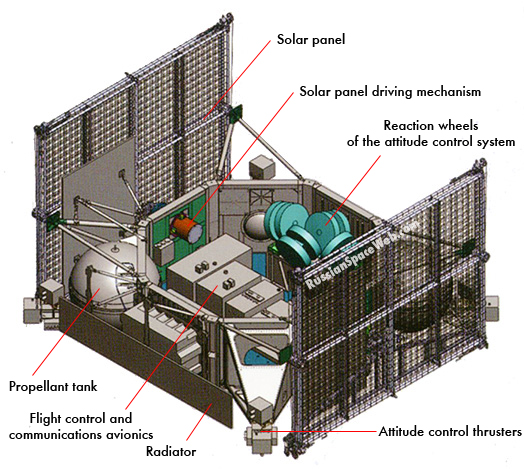
General architecture of the Navigator platform. Credit: NPO Lavochkin Known specifications of Navigator platform (410):
At the turn of the 21st century, NPO Lavochkin, a key Russian satellite developer, proposed a standard service module which could serve as a basis for a wide range of missions. It would feature systems designed to work in the vacuum of space and therefore would not need prone to failure pressurized compartments. The platform would also be able to maintain attitude control in space along all three axis with higher accuracy than the previous-generation spacecraft available for Russian scientific and application missions. A total of four reaction wheels would be installed onboard forming a shape of a pyramid to provide redundancy, even though any of the three such devices is enough for the three-axis attitude control. Dubbed Navigator, the vehicle was adopted for the Elektro-L and Elektro-M meteorological satellites, as well as for the Spektr-R (Radioastron), Spektr-RG (Rentgen), Spektr-UF, Gamma-400 (INSIDER CONTENT), Spektr-M (Millimetron) space observatories and the Arktika remote-sensing, weather and communications satellites. As of 2008, Spektr-R and Gamma-400 missions were expected to use a basic Navigator platform, while Spektr-RG and Spektr-UV telescopes would need some adaptation in case of their launch into the L2 libration points. A version of the platform designated Navigator-M would be used in the Spektr-M project. As of 2010, NPO Lavochkin was apparently bidding the Navigator platform in government tenders as a base for Arkon-2 and Astrometria missions. (434) According to NPO Lavochkin, the Navigator platform was designed to work on geostationary, Sun-sunchronous, highly elliptical Earth orbits and even near the so-called Libration or Lagrangian points, essentially in deep space. The satellite based on that platform could be integrated with Soyuz, Zenit or Proton launchers. An onboard flight control complex, BKU, of the Navigator platform was developed by MOKB Mars. The Navigator platform was known to include following key systems:
The propulsion system of the standard Navigator platform included four orbit-correction engines with a thrust of 5 Newtons and eight attitude-control thrusters with a thrust of 0.5 Newtons.
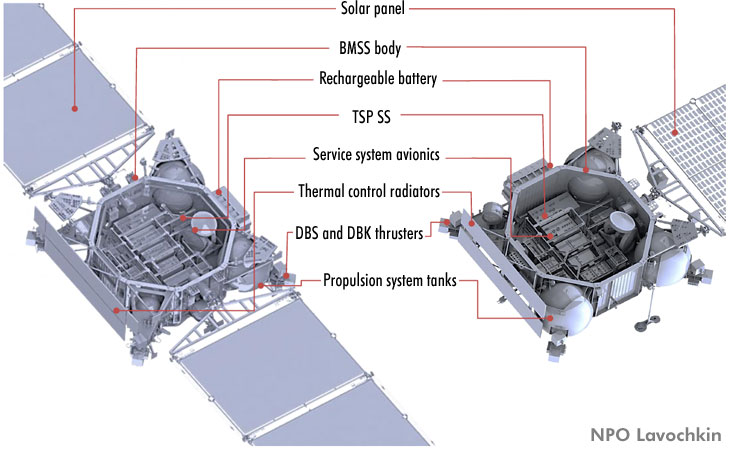
The general architecture of the Navigator service module for the Arktika-M satellite (left) and the Elektro-L series. The comparison of the BMSS (Navigator) module on Arktika-M No. 1 and Elektro-L3 and satellites (944):
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||