| |
|
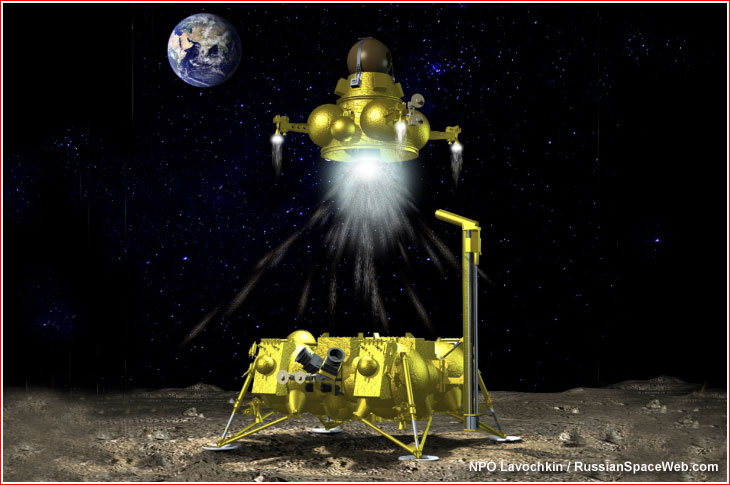
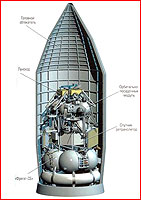
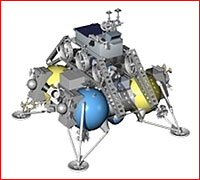
Luna-Grunt sample return mission
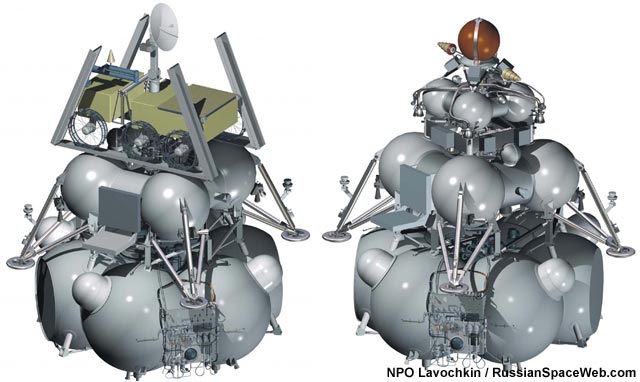
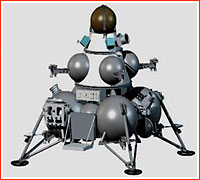
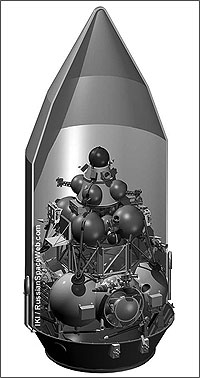
The Lunokhod (lunar rover) vehicle (left) and the Earth return vehicle -- both shown in launch configuration -- would comprise the Luna-Grunt mission. Since the Luna-Glob project has always been considered as only the first step in Russian "return to the Moon," developers at NPO Lavochkin conceptualized several follow-on missions during the first decade of the 21st century. Return of soil samples was considered as one of the most immediate goals of the long-term program. Unlike Soviet soil return missions in the 1970s, which were limited to a single and largely random sampling location, the new-generation program was expected to take advantage of robotic rovers. A pair of highly intelligent and mobile "Lunokhods" would have a task of carefully selecting and picking up samples from various locations within their 30-kilometer range in the polar regions of the Moon. The rovers would then load up to one kilogram of samples into a return rocket, which would be first delivered to the Moon in a separate mission. As many as six or seven samples from different locations would be unloaded from rovers into the return rocket. As of 2007, the rover mission was expected to head to the Moon as early as 2014, followed by a lander carrying the Earth return vehicle in 2015. Both spacecraft could be launched by a Soyuz-2 rocket with a Fregat upper stage. A later mission scenario, renamed Luna-Resurs-2, called for the launch of a lander with a rover, along with the lunar relay satellite on a Zenit rocket with the Fregat-SB upper stage. The design of the lunar relay satellite would be based on the Phobos-Grunt spacecraft bus. The lander with the return rocket would still fly onboard Soyuz-2. Both, the lunar rover and the Earth-return rocket would have a mass of around 400 kilograms and would be delivered to the Moon by the same standard lander, which NPO Lavochkin hoped to develop earlier for the Russian-Indian Luna-Resurs project. After the separation from the Fregat booster stage on its way to the Moon, the lander would use its own propulsion system to enter a circular orbit around the Moon with an altitude of around 100 kilometers. It would then fire its engine again to lower a perigee (lowest point of the orbit) to an altitude of only 18 kilometers above the Moon. From there, the final maneuver would be initiated to descent onto the surface. Initially, for the flight to Earth, the return stage was expected to use a direct ascent trajectory to lift off from the Moon and head back to an atmospheric reentry and landing. However, by 2010, the return trajectory included the injection of the soil-carrying stage into a parking orbit around the Moon and only then the engine firing to head to Earth. The new flight profile intended to facilitate the return of soil samples from polar areas of the Moon, as well as from its far side. In August 2010, the head of teh Space Research Institute, IKI, Lev Zeleny told radio station Ekho Moskvy that the return of water and ice samples would be the goal of the Russian lunar exploration program during the 2010s, following the Luna-Glob and Luna-Resurs missions. Polar regions of the Moon were considered as most probable areas for landing. (440) In addition to its scientific return, the Luna-Grunt mission was intended to develop spacecraft platforms, which would later be adapted in the next phase of the lunar exploration, such as the Lunny Poligon (Lunar Range) project. Moreover, rovers from the Luna-Grunt project, which would be designed to operate on the Moon for at least half a decade, could become the first components of the robotic lunar base to be built within the Lunnny Poligon project on the South Pole of the Moon. Changes in the project
By 2012, the rover mission was "divorced" from the Luna-Grunt project, which was now expected to be the fourth Russian spacecraft to head to the Moon in 2019, after a pair of Luna-Glob launches and the Luna-Resurs mission. Under this plan, Luna-Grunt would precede the new attempt to return soil samples from Phobos, now re-scheduled for 2020. In turn, the rover mission was postponed until 2021. As of 2012, both projects remained in a very preliminary stage of development and completely depended on the progress with their predecessors, which were scheduled to go to the Moon during 2015-2017. If successful, a lunar rover mission would pave the way to the Lunny Poligon project promised as early as 2022. In November 2012, ESA reported that in a broad cooperation agreement on exploration, encompassing the Moon, Mars and Jupiter, Roskosmos had invited ESA to assess possibilities for participation in Lunar Polar Sample Return mission, LPSR, with the launch no earlier than 2020 and the Luna-Resurs lander mission (launch after 2017). Russian-European discussions were focusing on the definition of potential contributions to these two missions, including a drill derived from ExoMars-2018 mission and a hazard detection and avoidance system developed for the Lunar Lander. Development promised after 2016 By the middle of 2014, the Luna-Grunt project was "integrated" into the long-term Russian plans for lunar exploration and funding for its development was requested within the 10-year budget beginning in 2016. According to that strategy, the Luna-Glob mission was not expected to lift off before 2025, even though an official relase posted by NPO Lavochkin in October 2015, promised that launch in 2024. Although existing space launchers were powerful enough to carry out lunar sample return in a single mission, NPO Lavochkin began considering a two-launch scenario for the Luna-Grunt mission so it could be used as a testbed for much more challenging task of bringing rocks from Mars. By 2015, the two-launch scenario was presented as the preferred flight mode for the Luna-Grunt mission. According to that plan, the landing module, PM, would deliver the ascent rocket to the lunar surface like it was done during the Soviet period. However after uploading soil samples into the return capsule, the ascent stage would insert itself into a 100-kilometer lunar orbit, instead of firing straight to Earth. In the lunar orbit, the soil-carrying capsule would be intercepted by an orbiting return module, OVM, which would perform all rendezvous operations. After reloading samples, the return vehicle, VA, would separate from the OVM and heads to Earth, while the orbital module would continue its mission in the lunar orbit for at least three years. According to NPO Lavochkin, the Luna-Grunt would test a landing method relying on a radio beacon, (possibly prepositioned on the surface of the Moon during a previous mission. The project would also feature a highly intelligent landing system capable of performing hazard avoidance maneuvers.
Specifications of the Luna-Grunt mission as of 2015:
Known specifications of the Luna-Grunt spacecraft circa 2010:
2020: Russian lunar sample return mission (Luna-28) at the crossroad In its original concept, Luna-28 was a part of the Luna-Grunt robotic soil-sampling mission designed to return lunar regolith from the polar region of the Moon back to Earth for scientific analysis. However, in 2020, the project was given the overarching task of serving as pathfinder for human expeditions. Luna-Grunt in 2021: Scientists push back against lunar program strategy By early 2021, Roskosmos planned to give the role of robotic pathfinder for human expeditions to the Moon to the Luna-28 sample-return spacecraft. According to the proposed strategy, a large lunar landing platform would travel to the Moon, testing crucial technologies for a subsequent human landing. But the idea did not sit well with Russian scientists. On the heels of the successful launch of the Luna-Glob (Luna-25) mission on Aug. 11, 2023, Head of Roskosmos Yuri Borisov said that the launch of the Luna-26 (Luna-Resurs Orbiter) spacecraft was then planned for 2027, followed by Luna-27 (Luna-Resurs Lander) in 2028 and by Luna-28 (Luna-Grunt) in 2030 or later. Even these dates had to be considered very optimistic given the need for a complete overhaul of these projects in order to replace imported components and instruments, not to mention funding levels in the program.
|
|