| |
|
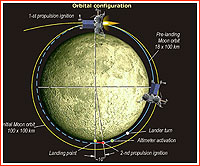
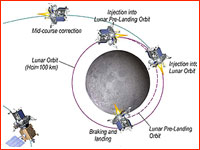
Landing scenario for the Luna-Glob project Attempted by Russian scientists for the first time since 1976, a touchdown onto the lunar surface would be one of the riskiest aspects of the Luna-Glob mission.
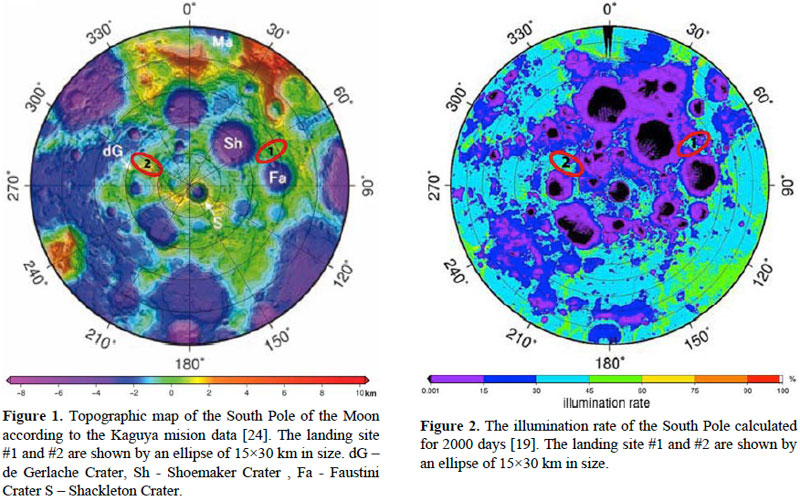
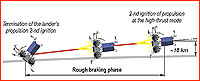
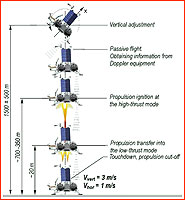
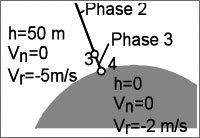
Topography and lighting conditions at possible landing sites of the Luna-Resurs mission. (433) The development of the Luna-Glob and Luna-Resurs projects in the post-Soviet Russia coincided with a series of scientific discoveries indicating presence of water ice pirmarily in the polar regions of the Moon. Huge scientific and practical significance of water made polar regions inevitable focus of new-generation of lunar missions in the first decades of the 21st century, including Luna-Glob. Having settled on the southern polar regions of the Moon as the primary destination of the Luna-Glob mission, Russian scientists embarked on the difficult process of selecting its exact landing site. On Nov. 10, 2010, the Laboratory for Comparative Planetology at the Vernadsky Geochemistry Institute, GEOKhI, submitted a report to the Space Research Institute, IKI, on the preliminary search for potential landing sites. Within days, this information was also transferred to NPO Lavochkin, prime developer of the spacecraft. In a telephone interview with the editor of this web site, Aleksandr Basilevsky, the Head of Laboratory for Comparative Planetology at GEOKhI, said that information from most recent American and Japanese spacecraft had helped in the selection of landing sites for Luna-Resurs. With the main goal of “touching” lunar water ice, Russian scientists used data from the Lunar Exploration Neutron Detector, LEND, developed by the Moscow-based Space Research Institute, IKI, and installed on the US Lunar Reconnaissance Orbiter, LRO. Developed by an IKI team, LEND helped detect vast regions on the Moon likely containing sub-surface ice. Initially, it was thought that ice deposits concentrated mostly in deep craters around polar regions of the Moon, which have not seen sunlight for eons. However, later analysis showed that at least some ice might have been buried in sunlit areas as well. This circumstance was crucial for the Luna-Resurs developers who had to reconcile their ambitious goals with severe technical limitations of landing in polar regions. Relying exclusively on solar power and in need of good communications with ground control, the Luna-Resurs spacecraft had to land in view of the Earth and have the Sun above the horizon. The Shternberg Astronomy Institute, GAISh, of Moscow State University, worked in parallel with GEOKhI in formulating landing site requirements for lighting and communications conditions. Thanks to data from the LEND instrument, Russian scientists identified 14 potential sites, which satisfied both conflicting criteria – being under the Sun and still hiding potential water ice close to the surface. However it was only the beginning of another arduous round of elimination of potential landing sites. “Out of these 14 sites, nine were simply scary,” Basilevsky said, “because of numerous craters and steep slopes in the areas.” Moscow-based NPO Lavochkin, the chief developer of Luna-Glob and Luna-Resurs projects, gave mission scientists tough requirements for the approach and landing areas which could be used by the spacecraft. Essentially, a stretched circle 30 kilometers long and 15 kilometers wide around the touchdown point, had to be free of any difficult terrain for safe approach and landing. The spacecraft would use a special Doppler radar with three beams which would continually scan the surface to provide altitude information for the flight control system. During the descent to the lunar surface, onboard computers would command the spacecraft’s main engine to burn at high thrust until it reached a hovering point above the landing site at an altitude of around two kilometers. From that moment, the main engine would shut down and the lander would start a nearly free fall, interrupted only by pulses of small thrusters counteracting the low gravity of the Moon. However deep craters or high mountains could easily confuse the guiding radar beams, causing the precious vehicle to smash into the surface. Yet, again, Russian scientists used previous lunar missions to avoid potential topographical dangers. Photos from the Japanese Selena orbiter, which entered lunar orbit in 2007, were used to assemble a complex puzzle of the potential landing regions. In addition, the data from the LOLA laser altimeter on NASA’s LRO orbiter was used to compile detailed profiles of the terrain over which the lunar lander would be approaching its landing site. Chosen sites are very preliminary To satisfy stringent landing safety requirements, only two potential sites near the South Pole of the Moon were finally selected out of the five finalists. Basilevsky stressed, however, that the intial choices were very preliminary and scientists could still find themselves at square one in the selection process. “If NPO Lavochkin decreases the size of the (landing) ellipse, and some rumors tell us, that they have this capability, we might drop what we have (now) and revisit what we have rejected,” Basilevsky explains, “There are couple of places, which would qualify if the landing ellipse decreases in size.” NPO Lavochkin was expected to complete an addition to the preliminary design of the Luna–Resurs mission around November 2010. In January 2011, IKI planned a major international conference in Moscow, which would be dedicated to the assessment of potential landing sites on the Moon. At the time, Lavochkin was yet to release a number of critical requirements for the landing, including altitude variations below the approach path and limits on the slope angles of the landing surface. "The reason we don't have it is because they are not ready for it yet," Basilevsky said, "We did try to guess by picking as even landing sites as possible..., as our task was to launch the whole machine of the project. Later we hope to do more detailed and serious work." Basilevsky estimated that NPO Lavochkin could produce their landing requirements for the Luna-Resurs spacecraft in the first few months of 2011. "However I believe they will procrastinate with that because the Moon is close, you can fly every month and you can change everything (in the mission plan) in the last few weeks (before launch)," Basilevsky said, "In order for them to reduce the size of the ellipse or to tell what slopes are scary for them, they need to play a lot – to do some modeling and so on. Until today they had much more pressing things to worry about." The European-built landing navigation and hazard avoidance system promised to improve landing accuracy of the Luna-Resurs mission to just three kilometers. Officially known as the Precise Intelligent Landing using Onboard Technology, or PILOT for short, the system was designed to provide key information to the lander during its autonomous final descent to the Moon. The PILOT system included landing cameras, 3D-imaging "laser radar" or LIDAR for hazard detection and avoidance and a high-speed processing computer. The PILOT was developed by Airbus Defense and Space centers in Bremen, Germany, and Toulouse, France, along with other industrial partners in Europe and Canada. To test the complete system, its demonstrator known as PILOT-D, was installed on the Luna-Glob lander, heading to the Moon first, followed by the fully workable system to be flown on Luna-Resurs. With the prospects of acquiring the PILOT system, in 2013, the Russian scientists promised to re-evaluate landing sites for Luna-Resurs in the following two years. On April 13, 2022, ESA announced that it had ended its cooperation with Russia on Luna-25 (Luna-Glob), Luna-26 (Luna-Resurs Orbiter) and Luna-27 (Luna-Resurs Lander) missions, as a response to the Russian aggression in Ukraine. The experimental PILOT-D package was removed from the nearly completed Luna-Glob lander.
Proposed landing sites for Luna-Resurs mission based on October 2012 launch date* (433):
Luna-Resurs landing requirements (433):
Next chapter: Luna-Resurs in 2017
|
|