| |
|
The Fobos mission During 1980s, Soviet scientists turned their attention back to Mars, after more than a decade-long hiatus. Capitalizing on the success of an international effort to explore Venus and Halley Comet in 1986, USSR scheduled a new mission called Fobos (Phobos), again with a broad foreign participation.
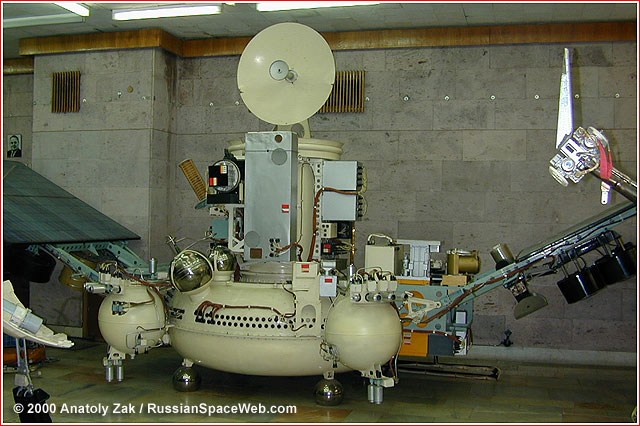
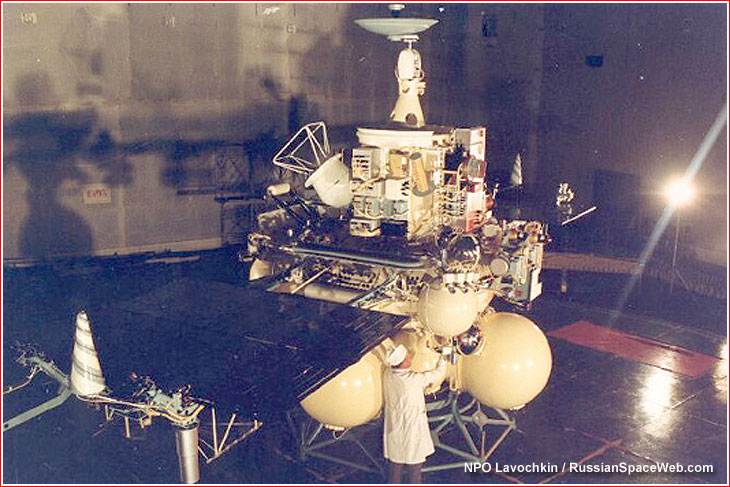
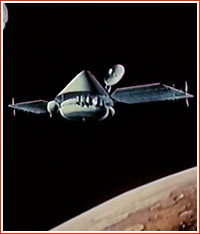
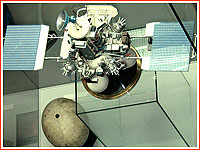
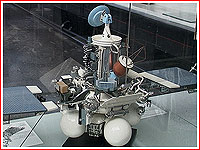
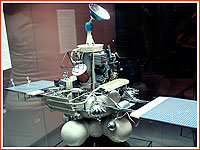
A full-scale demo of the Phobos spacecraft, as it would look in the Martian orbit, after jettisoning of the main propulsion unit, ADU. Origin of the Phobos mission Less than spectacular results delivered by the Soviet Mars probes at the beginning of the 1970s reportedly irritated political leadership so much that no funding was available for the Red Planet-bound spacecraft for almost 15 years. (392) Still, scientists at Space Research Institute, IKI, which led the Soviet space science program, had never lost interest in Mars, even when they were mostly preoccupied with the exploration of Venus. As early as the end of the 1970s, IKI strategists devised a new mission proposal which they thought would justify the return to Mars. The idea was to focus on the tiny Martian moons Phobos and Deimos, rather than on the Red Planet itself. (187) Phobos presented a particularly attractive target, since its orbit afforded a relatively easy approach for a Mars orbiter propelled by traditional chemical rockets. (284) It was also Phobos, whose projected low mass relative to its size, inspired a prolific Soviet astrophysicist Iosif Shklovsky to hypothesize in the popular press that the moon might be hollow and even of an artificial origin. Despite many less radical explanations of the phenomenon, Shklovsky's hypothesis remained popular for decades, as correspondence to the editor of this web site proves. At the beginning of 1985, just after the latest Soviet planetary spacecraft successfully blasted off, IKI scientists got their wish -- the mission to Phobos was approved by the government. With the Soviet missions to Halley Comet underway, first public announcements about the new plan were made in the following March. Developers got their work cut out for them, since they only had three and half years to prepare a complex project. The initial mission scenarios of the Phobos project envisioned a direct landing on the moon. (187) At least one Western source (396), suggested that the return of the soil back to Earth was mulled, perhaps as a next logical step following successful lunar sample-return missions. However even landing on Phobos was soon ruled out as too complex and unpredictable, given low and uneven gravity of the potato-shaped body. The next concept called for firing of a harpoon-like device from a distance of 20-30 meters, followed by the delivery of soil samples for analysis to a hovering spacecraft. Eventually, potential technical problems forced the scientific team to settle for a close-up encounter with Phobos and scanning of its surface with remote-sensing instrument. The latest advancements in laser technology provided the possibility of evaporating small amount of soil at close range and obtaining detailed spectral characteristics of the material. A special ion emitter would also be used for remote-sensing of the surface. It would be possible to determine the chemical element and isotope makeup of the moon's soil, which would be critical for understanding the origin and the evolution of this tiny corner of the Solar System. (394) The laser instrument and a associated spectrometer became the main scientific payload of the mission. (187) In addition to lasers, mini-landers could be dropped onto the surface of the potato-shaped Moon to perform in-situ experiments. Spacecraft bus design, the ADU unit On the eve of the Phobos project development, a basic architecture of the typical Soviet planetary probe was re-invented. In December 1978, NPO Lavochkin, a chief Soviet developer of planetary spacecraft, issued technical proposals for "Unified Automated Space Complexes for the Exploration of Mars, Venus and Moon, UMVL. One of the proposals included a 182E lunar orbiter which would inaugurate a new generation of planetary vehicles with a projected launch in 1982. In 1980, NPO Lavochkin drafted preliminary design for the new spacecraft bus, designated 1F and 2F, which could serve as a basis for various planetary probes and space observatories. Within two years, the design bureau issued technical proposals for the Radioastron (Astron-2/2A) radio telescope and a Lunar Science Satellite, LSN, (a.k.a. 1L). This time, their launches were aimed for 1989. On Aug. 1, 1983, the Military Industrial Commission, VPK, overseeing the Soviet rocket industry, issued a decision No. 274 entitled "On works for the development of automated planetary spacecraft and the exploration of planets of the Solar System, the Moon and cosmic space in 1986-2000. The document drafted an extensive array of missions all based either on the 1F platform and its variation customized for the exploration of the Sun and designated 1FS. The plan envisioned following missions:
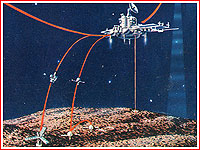
The new 1F platform essentially become a second-generation vehicle developed in the USSR for deep-space missions. NPO Lavochkin, a prime developer of the Soviet planetary hardware, justified the move by pure necessity. The old-fashioned Venera probes would be a ton overweight for a kind of mission conceived in the Phobos project, they said. (395) The architecture of the new platform was built around a thorus-shape instrument compartment, sitting on top of the autonomous propulsion system, ADU, receiving propellant from eight tanks. (Loosely resembling the propulsion section of Luna probes, the ADU unit would later incarnate into the Fregat upper stage.) A cylindrical payload module would be installed on the top of the instrument module. Such architecture allowed to minimize the mass of the spacecraft and the inertia to be overcome during engine firings. As a result, developers could place the main engine of the ADU on special rail guides instead of a gimbal mechanism in order to steer the thrust of the propulsion system. Traditionally for the Soviet planetary probes, the ADU's engine was developed by Aleksei Isaev's design bureau based on the existing hardware. The new engine enabled three times more firings than provided by the propulsion systems of the previous-generation Soviet Venus and Mars probes. The guaranteed life span of ADU was expected to reach 460 days. The ADU propulsion system would be jettisoned after the spacecraft entered so-called "observation orbit," from which only fine-tuning maneuvers would be required to reach the final destination of the mission. The ADU stage would be responsible for all trajectory corrections between the Earth and the planet, for braking maneuver to enter the Martian orbit and for maneuvers to reach the "observation orbit." Final maneuvers would be conducted with the help of a separate attitude control and stabilization unit. (395) The separation of ADU would expose a number of sensors, which belong to scientific instruments. (118) It was thought that the multi-tank ADU system would be easily optimized for various missions, by changing the number of tanks and their size. The capability of the new platform to conduct high-precision maneuvering near low-gravity targets was believed to be well tailored for the exploration of small bodies of the Solar System such as comets, asteroids and small moons. The spacecraft bus could be adapted to carry various payloads and detachable vehicles. Landing gear could be easily added to touch down on the planetary surface. Even docking with other spacecraft, to transfer cargo, such as capsules with soil had been considered. (395) Along with a new propulsion system, smaller and more effective batteries were installed. The onboard flight control complex, BUK, was based on the latest available computers. The attitude control system could use both a weak star or a brightly lit Phobos. Thanks to the use of onboard micro-processors, the spacecraft could follow a "flexible" control reflecting a real-time parameters of the mission rather than preprogrammed routines. Frog For the work on the surface of Phobos, VNIITRANSMASH design bureau developed a 50-kilogram PROP-F "jumping" lander. This type of movement was considered most feasible in the very low gravity of the Martian moon. (126) It could "hop around" the surface of the Moon with a spring-loaded legs, in the process of studying its surface. Mission organization Fresh from the success of the cooperative Vega missions, scientists from 14 countries on both sides of the Iron Curtain joined the Phobos project in an unprecedented international effort. Participants represented Austria, Bulgaria, Hungary, Ireland, East and West Germany, Poland, Finland, France, Czechoslovakia, Switzerland, Sweden, US and institutions of the European Space Agency. However to the chagrin of IKI scientists, the overall control over the mission was returned to the Ministry of General Machine Building, which oversaw the rocket industry. Once again, the manufacturer (industry) could essentially dictate the customer (IKI) characteristics of the project. According to Roald Sagdeev, the head of the IKI institute at the time, industry bosses envied the limelight enjoyed by IKI following the triumph of the Vega project. (187) Mission plan The approved Phobos mission scenario envisioned the launch of a pair of probes, which would enter orbit around Mars, and conduct close flybys of the Martian moon Phobos. The Proton rocket featuring a standard Block D upper stage would only be capable of sending an "overweight" six-ton probe on a highly elliptical Earth orbit, rather than on a direct path to Mars. As a result, the probe's own ADU propulsion system would be used to break out of the elliptical orbit and reach the interplanetary velocity. (396) Once, the spacecraft enters a path to Mars and its systems are activated, the Terek telescope installed on Phobos-1 would be used for observations of the Sun. During a cruise phase of the flight between Earth and Mars, two orbit corrections were planned -- first around seven or 10 days after launch, and another between seven or 15 days before a closest approach to Mars. As a result of the last maneuver, the spacecraft would enter an initial transfer orbit, which would take three days to complete and which would have a perigee of 500 kilometers. Two more ADU engine firings would follow, bringing the spacecraft to the circular equatorial "observation" orbit with the altitude of 6,330 kilometers. The spacecraft would be around 350 kilometers higher than its target moon, enabling a rendezvous every six days. During each encounter, the spacecraft would conduct "observations" of Phobos, first of all for navigational purposes. After around three months of shepherding the moon, the Phobos probe was expected to synchronize its orbit with that of its target, just 35 kilometers above the surface. Once the exact position relative to the moon was established, the vehicle would have to rotate to catch its target into the view of the radio altitude measuring device. At the altitude of two kilometers, an onboard sensor measuring relative velocity would be activated. Its information would be used to guide the spacecraft for the final encounter. In the meantime, the spacecraft would continue its descent until it reaches the altitude of 50 meters. From that point, the altitude measuring system would be used to hover over the surface of the moon. During next 15-20 minutes, the probe was to conduct a number of maneuvers to provide most favorable conditions for the operation of scientific instruments. In the meantime, the low-gain antenna would have to track the Earth for the real-time transmission of data to ground control. With the main remote-sensing experiments completed, a special robotic arm would release a long-duration automatic probe, DAS. It was to land on the surface and deploy a 20-meter long antenna of the penetrating radar. With extremely low-gravity on Phobos and the risk of landers bouncing off the moon's surface, a harpoon-like device would be fired to anchor the vehicle to the surface. DAS was also expected to sport a TV camera for imaging of the landing site on Phobos during its expected year-long mission on the surface. The DAS long-duration probe would be carried on Phobos-1 and 2. The PROP-F "hopping" probe was installed only on Phobos-2. In the meantime, the main spacecraft would climb to the altitude of around two kilometers above the moon. Before and after the Phobos encounter, comprehensive studies of Mars, its atmosphere, magnetosphere and ionosphere were to be conducted. Studies of Sun's corona and its chromosphere and interplanetary space were also envisioned. TV cameras, which were designed to track Phobos, could also be used to observe Mars before and after close encounter with its moon. The spacecraft was promised to function in the orbit of Mars for as long as two years, giving the vehicle an opportunity to watch the far side of the Sun invisible from Earth. (396) There were reports that had the mission of the first probe near Phobos been a complete success, the second vehicle could be sent to Mars' another moon - Deimos. (396) However differences in flight dynamics of such mission likely make such scenario impossible. Planned orbits of the Phobos spacecraft during the mission in the vicinity of Mars:
Preparing ground control Preparations for the Soviet return to Mars started with the upgrades to the nation's ground control network, particularly its deep-space components in Evpatoria, Crimea and Ussuriysk, Siberia. (393) Between 1983 and 1985, specifically for the Phobos project, a special ground station was built at the older KIP-15 control site in the siberian town of Ussuriysk. The facility was equipped with a Kvant-D station updated for receiving centimeter-band transmissions. A similar facility was previously built at the main Soviet deep-space communication site in Evpatoriya on the Crimean Peninsula. Upgraded Kvant-D facilities enabled to transmit telemetry at the rate of up to 131 kilobit per second from Martian distances extending as far as 400 million kilometers. The accuracy of trajectory measurements was brought up to 0.5 meters per second for velocity and 10 meters for distance. For the initial phase of Phobos' interplanetary trajectory, a number of additional assets were brought in as backup means of communication and control of the Phobos spacecraft:
In addition, the M-220 and ES-1045 flight control computers at all three sites, which would be involved in the Soviet deep-space missions to Venus and Mars, were upgraded with the new software, enabling automated calculation of navigation and processing of telemetry and scientific data. Leading Russian research centers TsNII-50, Applied Mathematics Institute of the Academy of Sciences and TsNIIMash developed new methods and software for trajectory calculations. Kvant-D station would be critical for the insertion of the Phobos spacecraft into a quasi-synchronous orbit with the martian moon, where the distance between the vehicle and the moon would fluctuate from 200 to 400 kilometers, and enabling the following approach of the spacecraft. (270) Preparing the spacecraft
Within the industry Phobos spacecraft were known as 1F No. 101 and No. 102, (where F apparently stands for Phobos). The total of 15 prototypes of the 1F spacecraft were built for various aspects of rigorous and all-encompassing tests. Critical thermal and vacuum testing of the Phobos spacecraft were conducted at the NIIKhIMMash center near Zagorsk at the end of 1986. The "electrical analog" of the Phobos spacecraft was completed by May 1987 clearing the way to three months of tests with various onboard systems. The autonomous tests of onboard systems were conducted from May 13 to July 17, followed by interface tests of individual systems with the spacecraft from July 18 to Aug. 14. After the disassembly of the vehicle by August 20, further "complex" tests were conducted until Oct. 26, 1987. There were no plans to conduct tests of a fully assembled vehicle No. 145, since it used only prototypes of onboard memory on a number of systems and test hardware. The spacecraft prototype was then used for electromagnetic compatibility tests in an anechoic chamber from Jan. 25 to Feb. 23, 1988. In the meantime, the first flight vehicle No. 101 started undergoing testing on Oct. 30, 1987. A series of integrated tests and interface checks of individual systems on the first probe lasted until February 1988 and on the second vehicle for about another month. In 1987, Glavkosmos displayed full-scale prototypes of Phobos spacecraft at the air and space show in Le Bourget, France, one of the examples of the Soviet "glasnost," given the fact that the mission was yet to be launched. On February 20 and March 30, 1988 two freshly tested flight vehicle arrived to Baikonur for final preparation for launch. More tests, including trails in the vacuum chamber of Baikonur followed. Final operations included the installation of long-delayed landers, layers of thermal protection blankets and loading of onboard propellant. A fully-assembled payload sections were then transferred to Site 95's processing building, where there were integrated with their Proton rockets. Phobos-1 mission Final preparations for the launch of Phobos spacecraft demonstrated a new level of openness in the Soviet space program. A number of Western dignitaries, including an Apollo-11 crewmember Michael Collins and a US Air Force delegation toured Baikonur and witnessed the final processing of the mission's Proton rockets, which were plastered with advertisements just for the occasion. (-) Still, rank-and-file military personnel at the site had to do an old silly routine during the arrival of foreigners of changing from uniforms into civilian clothes, in the effort not to admit the military nature of the facility. The Proton (8K82K) rocket carrying Phobos-1 (1F No. 102) lifted off from Baikonur's "left" launch pad at Site 200 on July 7, 1988, at 20:38:04,306 Moscow Time (17:38:04 GMT). After reaching the initial Earth orbit, the Block D (11S824 No. 2L) upper stage sent the probe into the higher orbit from which it then headed to Mars. On July 16, Phobos-1 made its first course correction, adding 8.9 meters per second to its velocity and putting it on course to reach the martian orbit at the end of January 1989. At the time, the spacecraft's close encounter with Phobos was scheduled for April 7, 1989. The Terek telescope, which was unique to Phobos-1, was activated on July 23, 1988, and took a total of 140 X-ray images of the Sun and its corona during July and August, catching a solar flare among other things. A total of 39 communication sessions was conducted with Phobos-2. (118) However on Sept. 2, 1988, when another routine communication session was scheduled with Phobos-1, the spacecraft did not call home. During a frantic search for the cause in the break of communications, an operator at mission control admitted his own fatal error. (187, 393) At the time, engineers were in process of transferring ground control from Yevpatoria's KIP-16 station to the TsUP main flight control center in Podlipki (now Korolev). Preparing for the break in communications, a large set of commands was transmitted to the spacecraft, which would program its behavior during the blockout period. A missing digit somewhere in the code, turned it into the command to deactivate the probe's attitude control system. A faulty code had never been tested on the ground as required, because the prototype system was not in operation at the time of the transmission. The spacecraft's own flight control system was not adequately protected from fatal errors. With its attitude control system shutdown, the spacecraft started slowly losing its orientation, mainly under the pressure of the solar wind, until its solar panels were no longer pointed to the Sun to provide enough power to vital systems. (187) According to some accounts, the fatal command was sent on August 29, 1988, and originally meant to activate a gamma-ray spectrometer onboard Phobos-1. Instead, it launched a program in the read-only firmware, which was designed to try the spacecraft's attitude control system during ground tests. Due to lack of time during pre-launch processing, this code was not erased from the spacecraft's memory before the actual mission. Since the program was concluding by switching off the attitude control system, Phobos-1 apparently did exactly that in flight. There was a glimmer of hope that some accidental tumbling of the dead spacecraft would eventually place its solar panels into the Sun, thus providing enough "juice" for the systems to revive operations. Unfortunately, the most stable natural attitude to which spacecraft would arrive after losing control, would most likely keep back side of solar panels to the Sun. After repeated attempts to re-establish communications during September and October, the mission was finally declared over on Nov. 3, 1988. (392) European astronomers apparently tried to at least detect the Phobos-1's position in the southern sky with a powerful telescope available at La Silla Observatory, Chile, but also without success. Along with Phobos-1 main spacecraft, a long-duration Phobos lander (DAS) was also lost. Although a duplicate vehicle was available on Phobos-2, however by the time of its arrival, nothing would be on the surface of the moon, to listen for seismic waves caused by the second touchdown. Such dual experiment was critical for understanding of internal composition of the mysterious moon. As it transpired, ground control apparently issued a faulty command, which turned off orientation of the low-gain antenna. (202) Phobos-2 mission The Proton (8K82K) rocket carrying the Phobos-2 (1F No. 102) spacecraft lifted off from Baikonur's "right" launch pad at Site 200, on July 12, 1988, at 20:01:43,185 Moscow Time (17:01 GMT). After reaching the orbit, the Block D (11S824F No. 1L) sent the probe into a higher orbit from where it then departed to Mars. On July 21, a successful orbital correction added 9.3 meters per second to the spacecraft's velocity. Like its ill-fated predecessor, Phobos-2 was originally scheduled to reach Mars by the end of January 1989. Its close encounter with Phobos was initially planned for June 13, 1989. (-) As usual, a variety of science experiments was conducted en-route. Gamma ray sources were registered and Sun was also monitored with the spacecraft's instruments. With the loss of Phobos-1, the second spacecraft could now use an available window of its predecessor for the critical rendezvous with the Martian moon at the beginning of April 1989. Phobos-2 entered orbit around Mars on Jan. 21, 1989. Although the orbital insertion was completed successfully, ground controllers had discovered a serious problem with the spacecraft's flight control system. One of three processors in the flight control system had failed and another showed signs of problems. Although a triple backup was designed to provide plenty of redundancy, at least two functioning units were required for the functioning of the flight control system. (187) The orbital maneuvers to rendezvous with Phobos started on Feb. 12, 1989. (202) A closest encounter was scheduled for April 7, 1989, at the distance of just 50 meters from the surface of the moon. During March, onboard checks showed normal operation of scientific payloads. (187) While the spacecraft was closing in on Phobos, ground controllers used its instruments to study Mars and its surroundings. The spacecraft was compiling a thermal map of Mars, as well as conducting photography in visual and infrared range of spectrum. The atmospheric studies of Mars had also been performed. On Feb. 21, 1989, Phobos-2 conducted TV imaging of Phobos from the distance of 820-1,100 kilometers. More pictures were taken on February 28 from the distance of 310-440 kilometers and on March 25 from the distance of just 180-270 kilometers. (118) On March 27, 1989, the spacecraft was scheduled to make another series of TV image of Phobos, which required it to face the martian moon, while pointing the main communications antennas away from Earth. At the end of the imaging session the spacecraft did not re-establish contact with the ground. Some four hours later, some weak indecipherable signals came, possibly indicating that the spacecraft was tumbling out of control. The subsequent evaluation showed that the situation would likely leave Phobos-2 without power, however what sent the probe into a spin in the first place apparently remained a mystery. (187) According to estimates, by April 8 or 10, 1989, uncontrolled rotation of Phobos-2 would bring down onboard temperature to around 0 degrees C. By the 13th or 14th of April the spacecraft would essentially freeze, making operation of any system impossible. Facing such diagnosis, mission control declared a Phobos-2 mission over on April 14, 1989. Yet, again, a human error at ground control was blamed for the failure, however details were not immediately made public. (392) One post-Cold War source cited the failure of the attitude control system. (270) The loss of onboard transmitter or a main flight control computer was also considered. The latter was probably the most likely failure scenario, since the system had exhibited potential problems earlier.
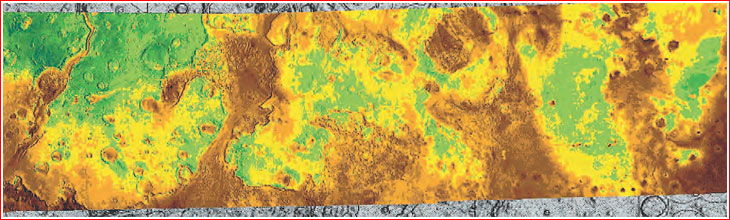
Thermal image of the Martian surface obtained by Phobos-2.
Thermal inertia map of the Martian surface produced based on data obtained by Phobos-2. Fallout from the failures In the spirit of Gorbachev's Perestroika and Glasnost, the Phobos project expanded openness of the Soviet space program to the world. However with the spacecraft's demise, it also became a symbol of inherit contradictions between the stagnating nature of the Soviet system and awkward attempts to reform it. Old-school representatives of the Soviet space industry were determined to keep in house any systemic problems, which could be uncovered by this double failure. As usual, the industry management intended to present international partners, as well as a wider public a positive picture of accomplishments, while any known failures were to be blamed on external forces, such as meteoroids, or solar radiation. However, Soviet scientists, who participated in the mission, believed that an honest and public investigation of the fiasco was required. Real technical problems had to be admitted and corrected. (187) Both Soviet and Western researchers conducted various estimates on the possibility of collision between the spacecraft and debris lifted from the Martian surface by ancient meteorite impacts and found chances of the event extremely low. Those who believed in internal problems argued that seeds of Phobos' demise were planted at the very start of the project. According to the IKI institute, the project of this magnitude required at least 6-7 years of development. In the meantime, Phobos was approved only three and a half years before its launch. As a result, the spacecraft was plagued by technical defects and suffered from low survivability of components. Such issues could've been corrected had the developers possessed time and resources. (394) In mid-May 1989, the project officials and their international partners discussed the mission results at the IKI institute in Moscow. Roald Kremnev, the project head at NPO Lavochkin, the Phobos prime integrator, awkwardly tried to list external forces responsible for the "sudden" loss of the probe. His arguments were met with a ridicule by IKI officials, as foreign partners looked on. In retrospect, some in the scientific community might've regretted this public controversy, however it remains unknown whether half-trues would have saved the reputation of the Soviet planetary program in the eyes of the international community. Scientific results of the mission Although many observers in USSR and abroad often describe the Phobos project as failure, such characterization is relative. Participants in the project quick to remind that comparing to previous Soviet launch attempts toward the Red Planet, Phobos would be by far the most successful Soviet mission to Mars. This opinion would be further emphasized by the failure of the next mission - Mars-96. Scientific data from Phobos probe helped to confirm a hypothesis that potential Martian water was "blown away" by solar wind, whose action would be unimpeded, due to lack of magnetic field on the planet. Some previously unseen areas of Phobos were photographed. The Termoscan instrument on Phobos-2 provided comparative studies of Martian surface in thermal and visual spectrum. A number of panoramic images of Mars covering large expanses of the planet's surface at the resolution 1.8 meters was obtained. (393) The Phobos mission also prepared scientific foundation for future Russian missions to the Red Planet - Mars-96 and, ultimately the return to Martian moon with the Phobos-Grunt project. Phobos scientific instruments:
Phobos project chronology Early 1985: Final go-ahead for the Phobos project development. 1985 March: Plans for mission to Phobos are made public. 1985: Ussuriysk ground station is upgraded for work with deep-space probes. 1986 Sept. 19 - Dec. 17: Thermal and vacuum testing of the Phobos spacecraft prototype at NIIKhIMMash. 1987 May: The assembly of the technological prototype No. 145 of the Phobos spacecraft for electrical tests is completed. May 13 - July 17: Autonomous tests of onboard systems. July 18 - Aug. 14: Interface tests of individual onboard systems. Aug. 20: The disassembly of Vehicle No. 145 following the interface tests is completed. Oct. 30 - Dec. 2: Autonomous tests of flight vehicle No. 101. Dec. 4 - Dec. 26: Individual system tests of flight vehicle No. 101. Dec. 27 - 1988 Jan. 28: Disassembled system tests of vehicle No. 101. Dec. 30 - 1988 Jan. 15: Autonomous electrical tests of the flight vehicle No. 102. 1988 Jan. 15 - Jan. 20: Individual system tests of flight vehicle No. 102. Jan. 20 - Feb. 16: Disassembled system tests of vehicle No. 102. Jan. 25 - Feb. 23: Electromagnetic tests of the spacecraft prototype in the anechoic chamber. Jan. 29 - Feb. 2: Complex tests of the assembled flight vehicle No. 101. Feb. 20: Flight vehicle No. 101 arrives to Baikonur. Feb. 27 - March 12: Tests of the assembled flight vehicle No. 102. March 6 - April 12: Complex tests of the flight vehicle No. 101. March 30: Flight vehicle No. 102 arrives to Baikonur processing complex. April 5 - May 10: Initial complex tests of the flight vehicle No. 102. April 13-22: Tests of flight vehicle No. 101 in vacuum chamber in Baikonur. April 23 - May 22: Overall complex tests of flight vehicle No. 101. May 11 - May 15: Tests of flight vehicle No. 102 in a vacuum chamber. May 16-26: Overall complex tests of flight vehicle No. 102. May 23 - June 6: Final electric tests of the flight vehicle No. 101 and the installation of a DAS lander. May 25: The DAS No. 101/1 lander arrives to Baikonur (13 days behind schedule). May 27 - June 10: Final electrical tests of the flight vehicle No. 102 and the installation of a DAS lander. June 3: The DAS No. 102/1 arrives to Baikonur (14 days behind schedule). June 3-12: Final mechanical operations on the flight vehicle No. 101 and the installation of the EVTI thermal insulation blankets. June 11-21: Final mechanical operations on the flight vehicle No. 102 and the installation of the EVTI thermal insulation blankets. June 13-18: Fueling of the flight vehicle No. 101. June 19-28: Final operations and launch vehicle payload section assembly with vehicle No. 101. June 22-27: Fueling of the flight vehicle No. 102. June 28: The transfer of the flight vehicle No. 101 to the Proton assembly building at Site 95. June 28-July 3: Final operations and the launch vehicle payload section assembly with vehicle No. 102. July 2: The rollout of the Proton rocket with flight vehicle No. 101 to the launch pad. July 4: The transfer of the flight vehicle No. 102 to the Proton assembly building at Site 95. July 7: The launch of vehicle No. 101 under the official name Phobos-1. July 9: The rollout of the Proton launch vehicle with the vehicle No. 102 to the launch pad. July 12: The launch of vehicle No. 102 under the official name Phobos-2. July 16: Phobos-1 makes a 8.9-meter per second course correction. July 29: Phobos-2 makes a 9.3-meter per second course correction. July 23: The Terek telescope on Phobos-1 initiates Sun observations. Aug. 29: What would become a fatal command was sent to Phobos-1. Sept. 2: No contact with Phobos-1 during a scheduled communication session. September-October: attempts to re-establish contact with Phobos-1 fail. Nov. 3: Officials confirm the loss of Phobos-1. 1989 Jan. 21: Phobos-2 enters orbit around Mars. Jan 23: Dead Phobos-1 flies by Mars without entering orbit. Jan. 29, 12:55 GMT: Phobos-2 fires engines to enter orbit around Mars. Feb. 12: Phobos-2 initiates rendezvous maneuvers with Phobos. Feb. 21: Phobos-2 flies by Phobos at a distance of 820-1,100 kilometers. Feb. 28: Phobos-2 flies by Phobos at a distance of 310-440 kilometers. March 25: Phobos-2 flies by Phobos at a distance of 120-270 kilometers. March 27: Mission control loses contact with Phobos-2. April 7: Scheduled close encounter with Phobos for Phobos-2. April 7: Scheduled close encounter with Phobos for Phobos-1 April 8-10: Estimated temperature onboard tumbling Phobos-2 fell to 0 degrees C. April 14: Mission control declares the Phobos-2 mission over. June 13: A scheduled flyby of Phobos by Phobos-2 as of summer 1988.
|
|