|
Mars sample return concepts
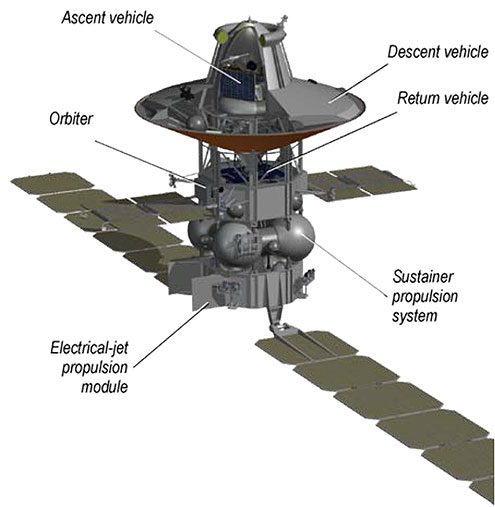
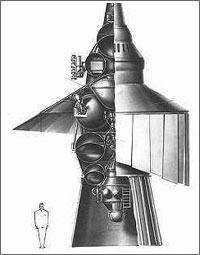
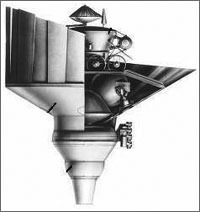
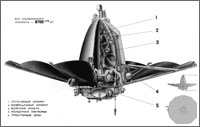
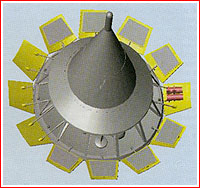
A two-part Mars sample return spacecraft proposed around 2008 consisted of a Mars orbiter and a Mars lander. In turn, the lander contained a descent and ascent vehicles, while the orbiter carried an Earth-return vehicle. Credit: IKI Project 5NM The earliest Soviet plans for delivering Martian soil naturally grew out of similar missions to the Moon developed in the second half of the 1960s at the NPO Lavochkin design bureau led by Georgi Babakin. At the beginning of 1970, Babakin directed his engineers to prepare a technical proposal for a Martian sample return mission. By the summer, the team had already formulated a concept of the spacecraft designated 5NM. According to the plan, the yet-to-be-operational N1 heavy-lifting rocket would launch a 98-ton behemoth into the low-Earth orbit in September 1975. From there, the fourth stage would accelerate a 20-ton spacecraft on its way to Mars. Similarly to the Soviet lunar exploration program, the Martian sample return mission would be preceded to the Red Planet by the 4NM rover in 1973. However both missions had to be ultimately postponed and scaled down, because the N1 rocket never "learned to fly." To fit the mission, renamed 5M, into the smaller Proton rocket, the soil-sampling spacecraft was split into three vehicles which would rendezvous in the Earth orbit and in the Martian orbit. Again, the complex 5M soil-return mission would be preceded by a one-way trip to Mars of the 4M rover. After several changes, the preliminary design of the 8,700-kilogram 5M vehicle was completed in January 1976. The spacecraft was to use an umbrella-like braking device expanding to a diameter of almost 12 meters to break itself in the Martian atmosphere. By 1978, the first prototype of the spacecraft and its components were built, however the project was deemed too expensive and complex for full-scale development at the time. (633) Still, low-level work on the the conceptual designs of the Mars sample return missions continued. Since one of the main challenges of the sample return mission was the need to deliver a large return rocket onto the surface of Mars, Soviet engineers mulled various ways of increasing the capabilities of the lander. During the 1980s, NPO Lavochkin in cooperation with the industry's main research institute -- TsNIIMash -- conducted a multi-phase research project code-named Zarya ("dawn"). Its participants looked at the possibility of using the atmospheres of destination planets as a braking medium during interplanetary voyages as an auxiliary to rocket propulsion. Post-Soviet plans By 1990, NPO Lavochkin's planners favored a cone-shaped vehicle that would be capable of active aerodynamic maneuvering in the Martian atmosphere in order to dissipate its speed and thus reduce the need for braking propellant. Not exceeding two tons in mass, the lander would sport 12 deployable petals, three of which would be used for aerodynamic steering during the descent through the Martian atmosphere. The remaining petals would open during the cruise flight in space to expose solar panels, attitude-control thrusters and navigation sensors. The lander code-named Berkut could become the basis for other deep-space missions tasked to penetrate the atmospheres of other planets, such as Jupiter or Venus. To send soil from Mars to Earth, a three-stage return vehicle would be employed. Its third stage carrying a small capsule for delivering samples to Earth, could be flight-tested during a planned mission to Phobos. Thanks to its maneuvering capabilities and the latest advances in avionics, the entire Mars-bound sampling spacecraft would be light enough to fit into the existing Proton or even Zenit-3SL rocket. (see appendix) Berkut project With the economic recovery in Russia in 2000s and the gradual re-birth of the deep-space exploration program in the country, the return of samples from Mars once again appeared on the long-term agenda of Russian planetary scientists. As a milestone toward this goal, an attempt would be made to return samples from the Martian moon Phobos within the Phobos-Grunt mission ("grunt" is the Russian for soil). It would pave the way to a much more ambitious Mars-Grunt project. However, following the spectacular loss of Phobos-Grunt in 2011, the joint Russian-European ExoMars mission took over the role of technological bridge to the Mars sample-return mission. The ExoMars could also form the foundation for an international effort to reach this goal. Soyuz-launched mission A new vision of post-Soviet designs of the Martian sample-return spacecraft emerged in 2004 from the Babakin space center, the newly-formed development arm at NPO Lavochkin. The organization devised a two-part mission that could be launched by a pair of Soyuz-2/Fregat rockets as early as 2016. The first vehicle would carry a Mars lander equipped with an ascent stage designed to lift between 100 and 200 grams of samples from the Martian surface to the orbit of the planet. There, it would link up and transfer samples to an orbiter featuring an Earth-return stage. In this incarnation of the project, the lander would use a giant inflatable heat shield to enter the Martian atmosphere. (391) Proton-launched mission By the middle of 2000s, it was deemed affordable to launch the Mars sample-return spacecraft on a single Proton rocket or on its future replacement - Angara. A concept proposed in 2008, called for the delivery of a 5,200-kilogram rover with 210 kilograms of payload to the Martian surface in 2016. During its three-year mission, dubbed Expedition-M, the rover would collect and store samples for a pickup by a return vehicle launched in 2018. Both spacecraft would be based on the Flagman spacecraft bus developed for the Phobos-Grunt project. Despite an optimistic launch dates in the proposal, the actual budget request submitted to the government in 2008 did not expect the launch of Expedition-M before 2022. This timeframe coincided with schedules drafted by NASA and European planners for the same type of mission. A concept presented in 2010 relied on a single Angara-5 rocket launching a six-ton dual spacecraft, featuring a cruise stage propelled by electric engines. It would be powerful enough to carry a two-part vehicle on a single flight. As in the previous concept, the lander would deliver a return rocket to the Martian surface, where it would be loaded with samples and then blast off back to the orbit of Mars. There, it would rendezvous with the orbiting vehicle. After the transfer of samples, the return carrier would head back to Earth. As of 2010, the mission was optimistically targeted for launch in 2018, following Phobos-Grunt in 2011 and Mars-NET in 2016. However during 2012, all plans for such a mission were pushed back toward the mid-2020s, after the completion of the ExoMars 2018 project and a possible repeat of the Phobos-Grunt mission. Moreover, all soil-returning procedures were now planned to be rehearsed during dedicated lunar missions at the end of the 2010s. Under such a scenario, the landing platform developed in Russia for the ExoMars 2018 mission could be modified for delivering a soil-carrying return vehicle. In the meantime, sample-collecting techniques developed for the Luna-Grunt project could be then applied to Mars missions. As of 2012, the most optimistic scenarios expected an international sample-return mission in 2022-2024. Other estimates predicted the mission in the second half of the 2020s. Berkut Mars vehicle for sample return (circa 1990s-2000s):
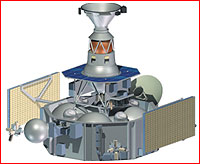
Russian Mars soil-sample return mission concept (Mars-Grunt) as of 2010-2011:
|
|