| |
Searching for details: The author of this page will appreciate comments, corrections and imagery related to the subject. Please contact Anatoly Zak. Related pages: History of Mars sample return projects
|
Site
news | Site
map | About
this site | About
the author | Testimonials | Mailbox | ADVERTISE! | DONATE! |
- |
|||||||||||||||||||||||||||||||||||||||||||
ExoMars to pave the way for soil sample returnRussian engineers preparing the launch of the ExoMars rover in cooperation with their European colleagues also hope to employ the same hardware to return a piece of the Red Planet back to Earth. Previous chapter: History of Mars sample return projects
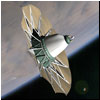
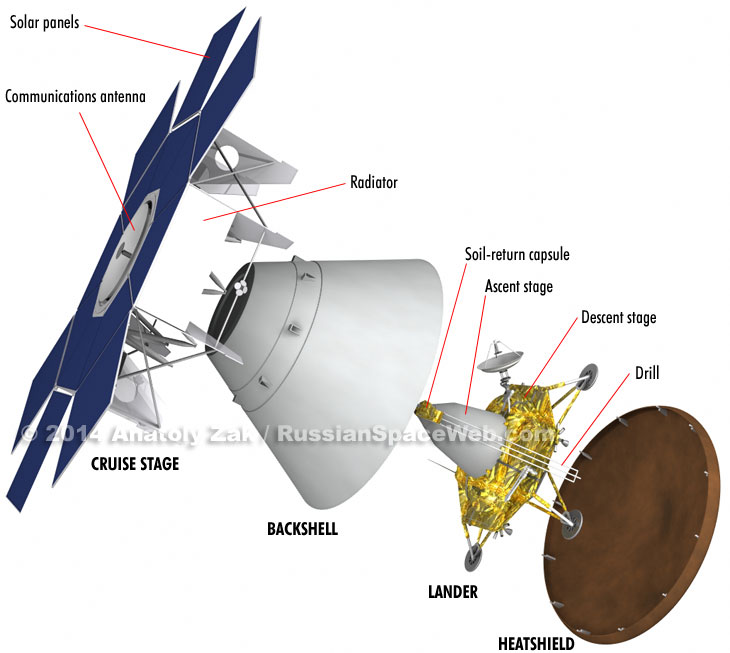
Above: Artist visualization of the sample return vehicle, as it was envisioned by Russian planners in 2014. The latest evidence of potential biological activity on ancient Mars further underscores the importance of studying soil samples from the planet in Earth's laboratories. However, after almost half a century of planning, a mission to bring rocks from Mars is yet to be implemented. Still, the search for a pathway to a Martian sample return mission continues. Last year, Russia agreed to launch the European ExoMars rover and to build its landing system. Following liftoff on a Proton rocket in 2018, ExoMars will traverse the distance between the two planets with the help of a cruise stage designed to provide power and attitude control during the journey. Upon reaching the Red Planet, the rover will penetrate its atmosphere inside a special aerodynamic cocoon. It will help to slow down the spacecraft before splitting into two halves and letting the platform holding the rover complete the landing under rocket power. In case of a successful mission, the Russian and European space programs could acquire not only a great scientific harvest but also a flight-tested hardware for future Mars landings. One of the most likely candidates to benefit from the engineering heritage of the ExoMars project would be a Mars sample return mission. Although it would be much more complex than the delivery of a rover, the sample-return mission architecture can be formed by replacing the mobile vehicle on the landing platform with a return rocket. After loading samples, the vehicle would lift off from the surface, starting its journey back to Earth. The USSR used a similar strategy in the 1960s and 1970s, when a common lander was used for the delivery of rovers and sample return vehicles to the Moon. In January 2014, Russian engineers presented a concept of a Mars sample return mission known as Expedition-M (Ekspedition-M). Even though, the Expedition-M project has been under consideration for a number of years, its latest incarnation was based on the design developed for ExoMars. The borrowed hardware included the cruise stage, a slightly modified aerodynamic descent module and the rocket-powered landing platform. The two-launch mission scenario relying on Proton rockets included a second spacecraft, which would enter the orbit of Mars and rendezvous with the ascent vehicle returning from the surface. It would then head back to Earth with the samples. The most unusual and controversial phase of the mission involved the transfer of the samples between the two spacecraft. The capsule with Martian rocks would be first ejected from the ascent vehicle in the Martian orbit. The Earth-return spacecraft would then home-in on the capsule and "swallow" it with a funnel-like receptacle. As a result, the Mars ascent rocket and the Earth-return vehicle would never make physical contact, as it was envisioned in practically all previous scenarios for such a mission. Russian planners proposed to test this risky capsule transfer method during a mission to the Martian Moon Phobos, which could follow the ExoMars around 2022 and precede the Expedition-M currently anticipated as early as 2024. 2015: Expedition-M survives budget cuts... as Phobos mission! Surprisingly, the Expedition-M project appeared to survive the budget cuts at the beginning of 2015, which claimed a number of high-cost and long-term projects. In April 2015, the development of the spacecraft was included into the proposed draft of the 10-year Federal Space Program beginning in 2016. At the time, the launch of the Expedition-M spacecraft was scheduled on the Angara-5 rocket with the KVTK space tug in the first half of 2024 from Vostochny, replacing the Proton rocket in Baikonur. However the mission was now re-purposed for returning samples from Phobos, instead of Mars. The technology could still pave the way to the Mars sample return in 2030s.
A projected budget for the Expedition-M project (in millions or rubles, as of April 2015):
(To be continued)
Read (and see) much more about these and many other space developments in Russia
APPENDIX
Known specifications of the Mars sample return mission (Expedition-M) as of 2014:
*In 2015, replaced with Angara-5/KVTK
Article, artwork, photography and 3D animation by Anatoly Zak; last update: May 4, 2017 Page editor: Alain Chabot; last edit: March 3, 2014 All rights reserved |
MEDIA ARCHIVE
A fragment from animation illustrating how the Expedition-M lander delivers soil sample onboard its ascent rocket. Click to play.
Expedition-M spacecraft on the surface of Mars. Click to enlarge.
Artist rendering of the E8-5M lunar sample return spacecraft on the surface of the Moon. Credit: NPO Lavochkin
An LB-09 soil-sampling mechanism for the Luna-24 probe (left) developed by Tashkent branch of KBOM (TashKBM) and capable of drilling to a depth of more than two meters. An unidentified follow-on device can be seen on the right. Click to enlarge. Copyright © 2002 Anatoly Zak
|
||||||||||||||||||||||||||||||||||||||||||||
Site
news | Site
map | About
this site | About
the author | Testimonials | Mailbox | ADVERTISE! | DONATE! |