|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Luna-Glob becomes a lander mission During the 2010s the Luna-Glob evolved to become an exclusively lander mission, while its Moon-orbiting component was restructered into a separate project.
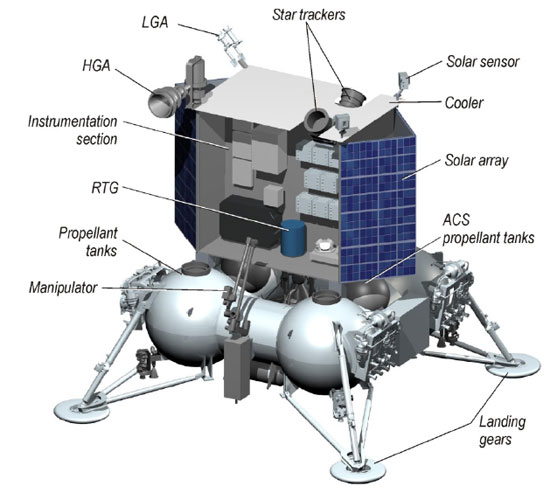
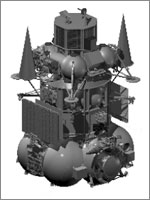
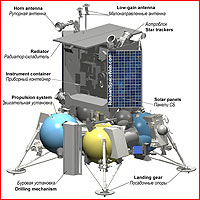
The architecture of the Luna-Glob lander as of the end of 2010. The soil-sampling robotic arm can be seen on left. An additional surface-drilling hardware could be included, with the total mass of science payloads onboard the lander reaching 30 kilograms. Credit: IKI / NPO Lavochkin
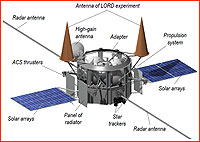
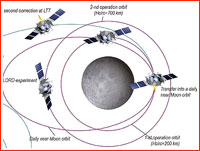
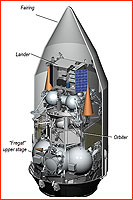
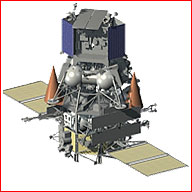
New lander concept, PsM Since around 2007, Russian and Indian space agencies had discussed a joint lunar mission, which became known in Russia as Luna-Resurs. Until 2009, Luna-Resurs was expected to follow Luna-Glob and, possibly, use its predecessor as a relay station for communications with ground control. However by 2010, Luna-Glob and Luna-Resurs became essentially parallel missions and both included standard landers developed by NPO Lavochkin. At the time, Luna-Glob was expected to feature surface-drilling equipment, while Luna-Resurs was expected to deploy an Indian-built rover. The Luna-Glob lander, dubbed Landing Module or PsM, was to function on the surface for around one year. (440) On April 15, 2010, the Space council of the Russian Academy of Sciences signed Decision No. 10310-09 to reconfigure the Luna-Glob mission and coordinate the development of its lander with that of the Luna-Resurs project. (444) At the beginning of 2010, public information about a launch date for the mission was blurry. According to some reports at the time, Luna-Glob had the same or lower priority than Luna-Resurs, pushing its launch date to 2013 or later. However as late as October 2010, other sources quoted 2012, as the launch date for Luna-Glob. In this case, the mission would still precede Luna-Resurs, which was scheduled to fly in 2013, according to all public sources. The Luna-Glob could land in the same polar area as Luna-Resurs or on the opposite pole of the Moon. By the end of 2010, sources at the Space Research Institute had confirmed that Luna-Glob had moved behind Luna-Resurs with the launch date of the Russian mission set for the Fall of 2014. (444) By the beginning of 2011, the mass of the lander was reported as 1,260 kilograms. (489) The 2010 orbiter concept Despite the new priority given to the lander, the Luna-Glob mission still retained its orbiter. The vehicle's payload was re-configured and a special adapter interfacing the orbiter with the lander was added. The architecture of the orbiter was to be based on the Phobos-Grunt spacecraft as much as possible, but the lunar spacecraft was to be built light enough to launch on the Soyuz-Fregat rocket. As of 2010, the Luna-Glob orbiter was expected to carry scientific payloads with a total mass of 120 kilograms and function in lunar orbit for up to three years. They would include remote-sensing instruments for mapping minerals and water ice distribution on the surface of the Moon to a depth of several meters, as well as temperature measurements on the lunar surface. Another scientific package would be dedicated to the studies of electric and magnetic fields, lunar dust and plasma in the vicinity of the Moon. The LORD radio detector would be used for astrophysics research, including space rays and high-energy physics. Finally, the orbiter would carry an instrument for registering micrometeorites and dust particles. (440) By the beginning of 2011, the mass of the orbiter was reported as 1,630 kilograms. (489) Following the launch of the Luna-Glob mission onboard a Soyuz-2-1b rocket from Baikonur Cosmodrome, the Fregat upper stage would use its own engine to reach an initial circular orbit around the Earth. Two additional firings of the Fregat upper stage would stretch the orbit into a long ellipse, rising its apogee (highest point) above the Earth surface. The Fregat upper stage would then separate and the Luna-Glob orbiter would fire its own engine to propel the spacecraft toward the Moon. The lander would then separate from the orbiter, followed by the jettisoning of the interface truss connecting two vehicles. On approaching the Moon, both orbiter and lander would use their own engines to brake into initial elliptical lunar orbits. Additional maneuvers would then place the orbiter into an operational circular orbit with an altitude of around 700 kilometers above the lunar surface. In the meantime, the lander would conduct several maneuvers into lunar orbit before committing to a powered descent and touchdown onto the lunar surface (440) near the North Pole.The lander was expected to function on the surface for at least one year, while the orbiter was to last for three years. (489) By November 2011, unofficial reports said that Luna-Glob had been switched from a Soyuz rocket to Zenit.
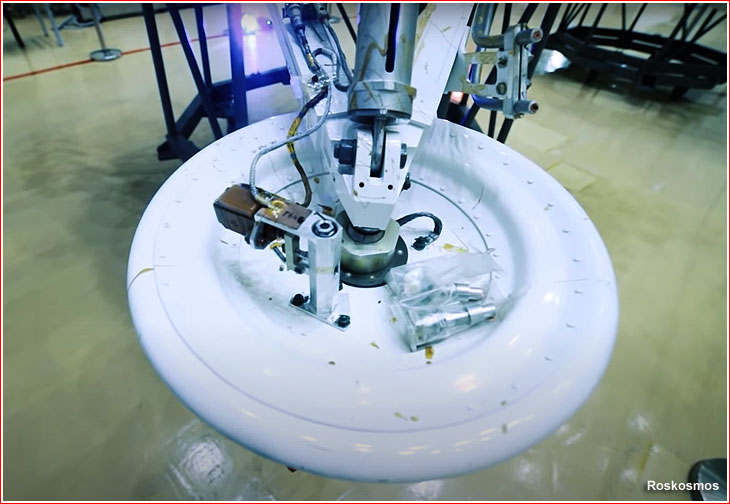
Landing gear assembly of the Luna-Glob lander as seen in 2022. Speaking at a press-conference dedicated to the 40th anniversary of Lunokhod-1 landing in 2010, Aleksandr Bazilevsky, the Head of the Laboratory of Comparative Planetology at Geochemistry and Analytical Chemistry Institute, said that sites for landing of Luna-Resurs and Luna-Glob spacecraft had already been selected. Key dates in the Luna-Glob project: 2010 Dec. 28: Roskosmos issues State Contract No. 361-5420/10 for the Luna-Glob research and development project, OKR, to NPO Lavochkin. 2011 Sept. 14: Roskosmos issues State Contract No. 361-9870/11 for the Luna-Resurs research and development project, OKR, to NPO Lavochkin. 2012 Dec. 21: Roskosmos issues State Contract No. 361-5420/12 for the Luna-Glob research and development project, OKR, to NPO Lavochkin. 2013 March 14: Roskosmos and the European Space Agency, ESA, sign an agreement on cooperation in exploration of Mars and other bodies of the solar system with robotic spacecraft. 2013 Dec. 24: Roskosmos issues State Contract No. 361-9009/13/445 for the Luna-Resurs-1 research and development project, OKR, to NPO Lavochkin. 2014 May 8: Section 8 of the Scientific and Technical Council at Roskosmos reviews the results of the Addendum No. 2 to the experimental project, DEP No. 2, of the Luna-Glob research and development project, OKR. 2014 Oct. 9: Roskosmos issues Decision No. ON-300-r on the organization of the flight control of the spacecraft for fundamental scientific rsearch. 2015 Aug. 26: Roskosmos and ESA exchange letters on the initial phase in the exploration of the Moon. 2015 Aug. 28: Roskosmos issues Decision No. MKh-316-r on revision of the implementation of the Luna-Glob research and development project. 2016: The launch of a Soyuz-2-1b rocket with a Fregat upper stage and the Luna-Glob-1 (Lander) from a Soyuz pad in Vostochny is promised in November or December 2019. 2020: The launch of a Soyuz-2-1b rocket with a Fregat upper stage and the Luna-Glob (Luna-25) lander from a Soyuz pad in Vostochny is promised in October 2021.
Russian payloads for Luna-Glob and Luna-Resurs mission, as identified during 2010 (423):
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||