| |
Searching for details: The author of this page will appreciate comments, corrections and imagery related to the subject. Please contact Anatoly Zak. Related pages:
|
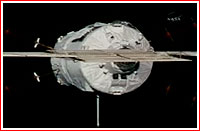
The Jules Verne Automated Transfer Vehicle (ATV) approaches the International Space Station on Monday, March 31, 2008, for its Demonstration Day 2 practice maneouvers. Jules Verne moved to within 11 meters of the Zvezda Service Module in a rehearsal for the first docking attempt on April 3. Credit: NASA
The ATV-1 mission Europe makes a leap in manned spaceflight Published: 2008 March 9 Europe’s brand-new transport ship designed to re-supply the International Space Station, has began its maiden voyage. The launch of the Ariane-5 rocket carrying the first Automated Transfer Vehicle, ATV, took place as scheduled during early hours of March 9, 2008, from the European spaceport in Kourou, French Guiana. Soon after the launch, ESA had confirmed that solar panels and the antenna for communication with the ISS on the ATV spacecraft had successfully deployed. A global positioning system onboard had also activated. Some four hours after the separation of the ATV from the upper stage of the launch vehicle, flight controllers did notice a slightly off-nominal behavior on one of four sets of propellant lines, known as "chains," which supply fuel and oxidizer to the ATV's engines. Apparently, as a result of pressure difference in the particular set of propellant pipes, the flight control system switched to an alternative chain, as it was designed to do in such situation, John Ellwood, the head of the ATV program said. According to Ellwood, the ATV needs to have three out of four propellant chains operational in order to conduct docking with the ISS. Still, officials considered delaying the first orbital maneuver scheduled for Wednesday, March 12, in order to evaluate the problem and, if possible bring the isolated propellant chain back online for redundancy. Experts speculated that vibration during the launch might've played a role in the anomaly, however needed more time to analyze the issue more thoroughly. The 19,012-kilogram ATV-1 vehicle was dubbed Jules Verne, after a prolific 19th century French novelist, who made many brilliant predictions about the future of space flight. The spacecraft is expected to be the first in a series of such ships heading to the station roughly every 17 months. They will play a critical role in supporting human permanent outpost in the Earth orbit, especially after NASA retires the Space Shuttle in 2010. In addition to its space station role, the ATV project brought European aerospace industry ever closer to developing a vehicle for human space flight. Even though, it is not capable of carrying people, the ATV gives Europe’s future astronauts the biggest hope for entering space onboard their own spacecraft. It sports all necessary systems for automated rendezvous and docking with the space station, while its internal cargo volume provides short-sleeve environment for the station crew. European Space Agency published several concepts for the follow-on versions of the ATV ship, including one equipped with a capsule capable of returning cargo to Earth. Sources within the European aerospace industry also said that ATV’s engineering experience could serve as a bridge toward a new-generation manned spacecraft, possibly developed in cooperation with Russia. The flight plan for ATV-1 calls for the docking with the International Space Station, ISS, at the beginning of April 2008, after an array of tests and maneuvers in orbit. It will then remain as a part of the orbital complex until August, while the station’s crew members unload its cargo and use its engines to raise the outpost’s orbit. Upon completing its mission, the ATV-1 will undock from the station with up to 6.4 tons of trash. The vehicle will then be directed into the Earth atmosphere to burn up over the remote area of the Pacific Ocean. ATV-1 Jules Verne in orbit On March 11, 2008, ESA announced that following an overnight recovery operation, ATV's propulsion system has successfully been restored. The spacecraft has since performed the first orbital manoeuvres necessary to set up phasing with the ISS. The ATV-1 remained on schedule for docking with the ISS on 3 April, ESA said. In-orbit maneuvers On March 13, 2008: The ATV-1 had successfully passed an initial test of its Collision Avoidance Maneuver capability, clearing the way for a full demonstration of this vital functionality on March 14, 2008. On March 14, 2008, mission controllers received confirmation shortly after 09:45 UT that the ATV-1 had successfully demonstrated the critical Collision Avoidance Maneuver. The crucial test began at 07:57 UT, and included placing the spacecraft into a minimally functioning 'survival' mode, ESA said. The in-flight Collision Avoidance Maneuver, or CAM, demonstration was necessary to prove that the spacecraft could reliably move away from the ISS in case of any problems during the final rendezvous and docking with the International Space Station. Upon detection of a critical failure or an unsafe situation, the spacecraft's Monitoring and Safing Unit (MSU) is designed to isolate the ATV's nominal systems and issue a CAM command. The complex procedure involved shutting down all of the normal control systems and placing the spacecraft into 'last-chance' survival mode. After the maneuver was positively demonstrated and confirmed, controllers implemented a lengthy 'exit-from-survival' recovery process that brought all systems back into nominal operation. The test was conducted with ATV orbiting well away from the ISS, and included a 200-second thruster burn, which took place as the spacecraft passed over northern Africa, ESA said. On March 29, 2008, ATV-1 Jules Verne demonstrated its ability to navigate safely from a point 39 km behind the ISS to a stand-off point just 3.5 km away using relative GPS navigation, the European Space Agency, ESA, announced. The vessel then executed an escape maneuver commanded from the ATV Control Center in which the craft flew off to a safe distance. The demonstration also confirmed Jules Verne is able to establish a continuous two-way data link with the ISS. Using the high-rate S-band communication link, which was switched on at a distance of 40 km from the ISS, Jules Verne for the first time conducted relative GPS (Global Positioning Satellite) measurements with the Station. Relative GPS is a navigation technique executed by computers between the ATV's GPS receiver and the ISS GPS receiver that enables ATV to navigate relative to the Station with very high accuracy. When Jules Verne reached the closest holding position, at 3.5 km from the ISS, the bus-sized spaceship turned on its external tracking lights and activated the Russian-built Kurs rendezvous radar with equipment on both spacecraft. The robust and historical Kurs system, a concept which has been used for decades, provides relative distance and velocity with independent data for the crew monitoring during Jules Verne's final approach to the Station. Data collected throughout the first demonstration day will now be analyzed by the ESA JADOR (Jules Verne ATV Demonstration Objectives Report) team. A report will be submitted to the ISS Mission Management Team. After an assessment and authorization on 30 March, ATV can proceed to Demonstration Day 2 on Monday (including an approach to within 11 m of the ISS). “The first analysis from the JADOR are looking pretty good. We are going to spend some hours now analyzing them further. We are quite confident,” said Alberto Novelli, ESA’s Mission Director at ATV-CC. On 2 April 2008, Jules Verne was formally cleared to proceed with the first ISS docking attempt, scheduled for 3 April 2008 at 16:41 CEST (14:41 UT), ESA announced. The official go-ahead came from the International Space Station Mission Management Team (IMMT) after two flawless demonstration days in which Jules Verne proved its operational capabilities. New vessel arrives to the station Published: 2008 April 3 Europe's brand-new cargo ship to re-supply the International Space Station successfully docked with the orbital outpost Thursday, April 3, 2008, at 10:45 a.m. EST. According to the European Space Agency, ESA, contact of the vessel's docking probe with the station's service module was originally expected at 16:41 CEST (14:41 UT), with full capture scheduled for 17:15 CEST (15:15 UT). However, a few hours before final contact, flight controllers considered delaying the docking a few minutes to improve lighting conditions on the docking targets onboard the station's service module. The unmanned spaceship maneuvered from a holding position 39 kilometers behind the 275-ton space outpost and conducted a four-hour staged approach with several stops at reference points for checks, ESA said. It autonomously computed its own position through relative GPS (comparison between data collected by GPS receivers both on the ATV and the ISS) and in close range it used videometers pointed at laser retro-reflectors on the ISS to determine its distance and orientation relative to its target. At 9:53 a.m. EST on April 3, flight controllers gave the go ahead for the final approach of the ATV-1 cargo ship to the station. At 10:15 a.m. EST, the ATV reached the so-called S4 point of its docking trajectory, located just 19 meters (62 feet) from the station, as the two vehicles were flying over the southern Pacific Ocean. Around 10:35 a.m. EST, flight controllers cleared the 19-ton ship to move to the final station-keeping point located just 11 meters from the station. The ATV-1 reached that point at 10:39 a.m. EST, as flight controllers on two continents started final checks for docking. At 10:41 a.m. EST, flight controllers in Toulouse, France, gave the final go ahead for docking. Final approach was at a relative velocity of seven centimeters per second and with an accuracy of less than 10 centimeters, while both the ATV and the ISS were orbiting some 340 kilometers above the Eastern Mediterranean, according to ESA. Following the successful linkup, the flight controllers in Toulouse confirmed closing all the hooks and latches between, the cargo ship and the station, ensuring the successful completion of the docking process. The opening of the hatches between two craft was scheduled for Friday, April 4, 2008, around 4:30 a.m. Houston Time, but actually took place some 45 minutes later. If the docking had not occurred for any reason, the next possible window would have been available 48 hours later on Saturday, April 5, 2008. The ATV-1 was expected to remain docked to the ISS for up to six months. End of mission At the end of a flawless six-month mission, Automated Transfer Vehicle, ATV, undocked from the International Space Station on Sept. 5, 2008, at 23:29 hours CEST, European Space Agency, ESA announced. At the time, the ATV was scheduled to reenter the on Sept. 29, 2008.
Page author: Anatoly Zak; Last update: September 9, 2008 Editor: Alain Chabot; Last edit: April 5, 2008 All rights reserved
|
MULTIMEDIA GALLERY
A spectacular video of the ATV-1 launch captured from the Toucan viewing site on March 9, 2008. Copyright © 2008 Anatoly Zak
A man, a car and a rocket: The Ariane-5 rocket with the ATV spacecraft prepares to leave the assembly building on the morning of March 8, 2008, as a space center technician dressed in typical white overalls walks by. Click to enlarge. Copyright © 2008 Anatoly Zak
The Ariane-5 rocket with the ATV spacecraft rolls out from its assembly building on its way to the launch pad in Kourou, French Guiana, on March 7, 2008. Click to enlarge. Copyright © 2008 Anatoly Zak
ESA officials outline the ATV mission to European dignitaries and journalists on March 8, 2008 at the Jupiter building in Kourou, French Guiana. Left to right: John Ellwood, ATV Project Manager; Jean-Jacques Dordain, the ESA Director General; Jean-Yves Le Gall, Arainespace Director General; Yannick d'Escatha, CNES President. Click to enlarge. Copyright © 2008 Anatoly Zak
The Ariane-5 rocket with the ATV cargo ship lifts off Sunday, March 9, 2008. Copyright © 2008 Anatoly Zak
The successful launch of the ATV was followed by an impromptu celebration outside the Jupiter building in Kourou, French Guiana. Click to enlarge. Copyright © 2008 Anatoly Zak
The Jules Verne Automated Transfer Vehicle (ATV) reaches S4 point on its approach path, just 19 meters from the station on Thursday, April 3, 2008. Click to enlarge. Credit: NASA TV
The Jules Verne Automated Transfer Vehicle (ATV-1) docks to station's service module Thursday, May 3, 2008. Click to enlarge. Credit: NASA TV |