| |
|
First attempt to revive Luna-Glob The effort to jump-start the Luna-Glob project started at the end of 1999, or almost two years after the financial crisis in Russia stalled the program. At the time, the ever-increasing complexity of the flagship mission to Phobos gave scientists a reason to advocate a pathfinder test flight, which could try new hardware and technologies proposed for the previously approved Phobos-Grunt project.
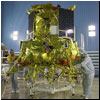
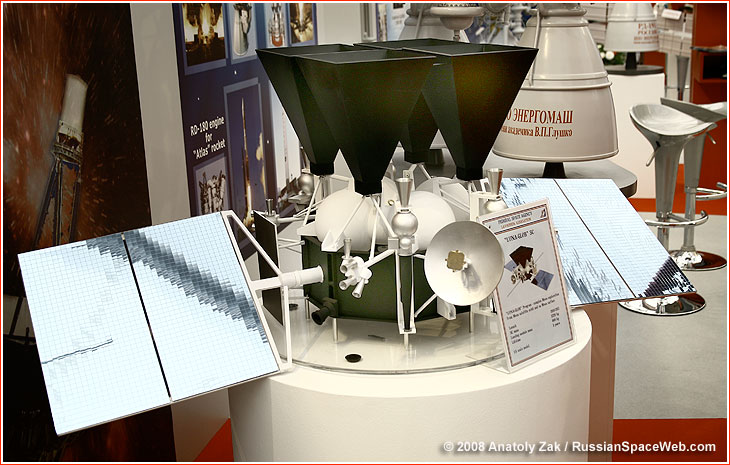
A 1-to-5 scale model of the Luna-Glob spacecraft circa 2008. Notable is a quartet of spear-shaped penetrators attached to the periphery of the orbiter module based on the Phobos-Grunt platform and four horn-shaped radar antennas of the LORD instrument. At the time, the official data promised the launch of the 2,321-kilogram spacecraft in 2010 or 2011 for a three-year mission, including the delivery of a 600-kilogram payload to the surface of the Moon. Attempts at rebirth On November 12, 1999, the Vernadsky GEOKhI institute officially asked the Russian Academy of Sciences president Yuri Osipov to support the idea of using the Phobos-Grunt platform for a mission to the Moon. Indeed, a modest sum was considered in the 2000 space budget for the preliminary evaluation of the plan, however the idea was ultimately rejected. Phobos-Grunt would remain the first Russian planetary mission to go into deep-space after the Mars-96 fiasco. Internationalization of the project: Japan Another attempt to revive the Russian lunar program was made by way of an international venture. Obviously, any project involving foreign participation and endorsed by an inter-government agreement would have a better chance of getting funding. In November 2004, at the lunar exploration conference in India, the head of Vernadsky GEOKhI, Erik Galimov, discussed just such an option with the head of the Japanese Lunar-A project. Typically for a planetary exploration project, the rocket was the most expensive item of the Lunar-A program, dragging behind the funding. As a result, the potential partners discussed a scheme under which Russia would provide the launcher capable of delivering a 550-kilogram spacecraft into lunar orbit in 2006, in exchange for merging Luna-Glob and Lunar-A projects. Since a Japanese team had made significant progress in the development of penetrators equipped with seismic sensors, it would be logical to carry them onboard the Russian spacecraft. Galimov sent this proposal to the head of the Russian Academy of Sciences, Yuri Osipov, who in turn, on Feb. 2, 2005, made an official request on the subject to the head of Roskosmos, Anatoly Perminov. By March 21, Perminov responded that it would not be possible to fund an extra Soyuz rocket with a Fregat upper stage at a price tag of 1,000 million rubles and Japan would have to purchase the vehicle commercially. That is exactly what European Space Agency had decided to do for its Mars and Venus probes. Perminov did confirm the possibility of the Luna-Glob launch in 2012. As a cheaper alternative, GEOKhI requested Moscow-based Khrunichev enterprise to evaluate the possibility of launching Lunar-A on a Rockot booster. In March 2005, the Khrunichev director informed GEOKhI that a preliminary analysis confirmed the possibility of carrying the Lunar-A into the Earth orbit, along with a Japanese solid-propellant escape stage. Despite the technical feasibility of this plan, the scenario again required funding support from the Russian space agency, which was not forthcoming. Still, negotiations with the Japanese lunar team resumed during another lunar exploration conference, ILWEG, in Beijing in 2006. The head of NPO Lavochkin, Georgy Poleshyuk and the company's leading developer, A. V. Lukyanchikov, who had first proposed the design of penetrators for Luna-Glob, discussed the possibility of equipping the Russian spacecraft with Japanese penetrators, which, by that time, had gone through full-scale tests. Soon after the conference, Lukyanchikov and O. B. Khavroshin visited Japan. The Japanese delegation then visited Russia, however in the end no agreement could be reached. The Japanese Lunar-A project itself was canceled by the beginning of 2007. At the time, hopes still remained that Japanese penetrators could fly onboard Luna-Glob. New beginning for Luna-Glob In the second half of the 2000s, funding for the Russian space program started improving, promising a revival of some stalled projects, including Luna-Glob. Speaking at the 5th International Aerospace Congress in Moscow, on August 29, 2006, Deputy Chief of the Federal Space Agency, Vitaly Davydov, listed Luna-Glob among high-priority exploration projects funded by the Russian government. In December of the same year, Roskosmos announced that the launch of the Luna-Glob spacecraft was scheduled for 2012. Moreover, in November 2007, Russian officials quoted the launch date for Luna-Glob as 2010 and at the beginning of December 2007, during President Putin's visit to NPO Lavochkin, its head Georgy Poleshuyk announced that the first new-generation spacecraft would be launched toward the Moon in 2009, or "three years earlier than planned." Initial requirements issued in 2008 for the preliminary design of the Luna-Glob project, called for the launch of the probe onboard a Soyuz-2 rocket with a Fregat upper stage. The spacecraft would have a mass of 2,125 kilograms and carry four penetrators and an orbiter. Following the release of the penetrators, the orbiter would conduct a three-year scientific mission in lunar orbit. (388) In the meantime, plans to carry a small lunar lander onboard Luna-Glob were abandoned sometime after 2006. Cooperation with China The jump-start of the Russian lunar exploration program also coincided with the emerging space power of China. The two countries apparently looked at the possibility of cooperation in the field lunar missions on September 8, 2006, during the 7th meeting of a sub-commission on space, which was a part of the Russian-Chinese commission, preparing regular summits. Speaking to journalists, head of Roskosmos, Anatoly Perminov, said that lunar exploration was a priority during the meeting and several contracts involving Russian and Chinese organizations had been signed. Perminov promised an agreement on cooperation in the field before the end of 2006. However no actual joint mission was ultimately announced. Loss of penetrators For a number of years, high-speed penetrators represented a signature of the Luna-Glob project. However the concept posed a serious technical risk for the mission. Available test data could only confirm that the seismic equipment onboard penetrators could survive the impact with a speed of 1,500 meters per second. In the meantime, the actual impact speed during the Luna-Glob mission was expected to reach 2,500 meters per second. Given the fact, that Luna-Glob would be the first Russian mission to the Moon in decades, the penetrator experiment looked increasingly risky. Initially, there was an attempt at reducing the speed of penetrators to a semi-hard landing. However NPO Lavochkin struggled to develop the solid-propellant system which would have to slow-down the penetrators during their descent to the Moon. Apparently, sometime before 2010, the decision was made to abandon the development of penetrators for the Luna-Glob mission.
Evolution of the Luna-Glob mission from 2007 to 2017:
|
|